E6581818
- 12 -
3.3. The details of the parameter setting
3.3.1. Network error detection (c100 - c103)
▼Display of trip information
err8 (Optional unit fault 1: 0x001B): Network error stop
▼Related parameter
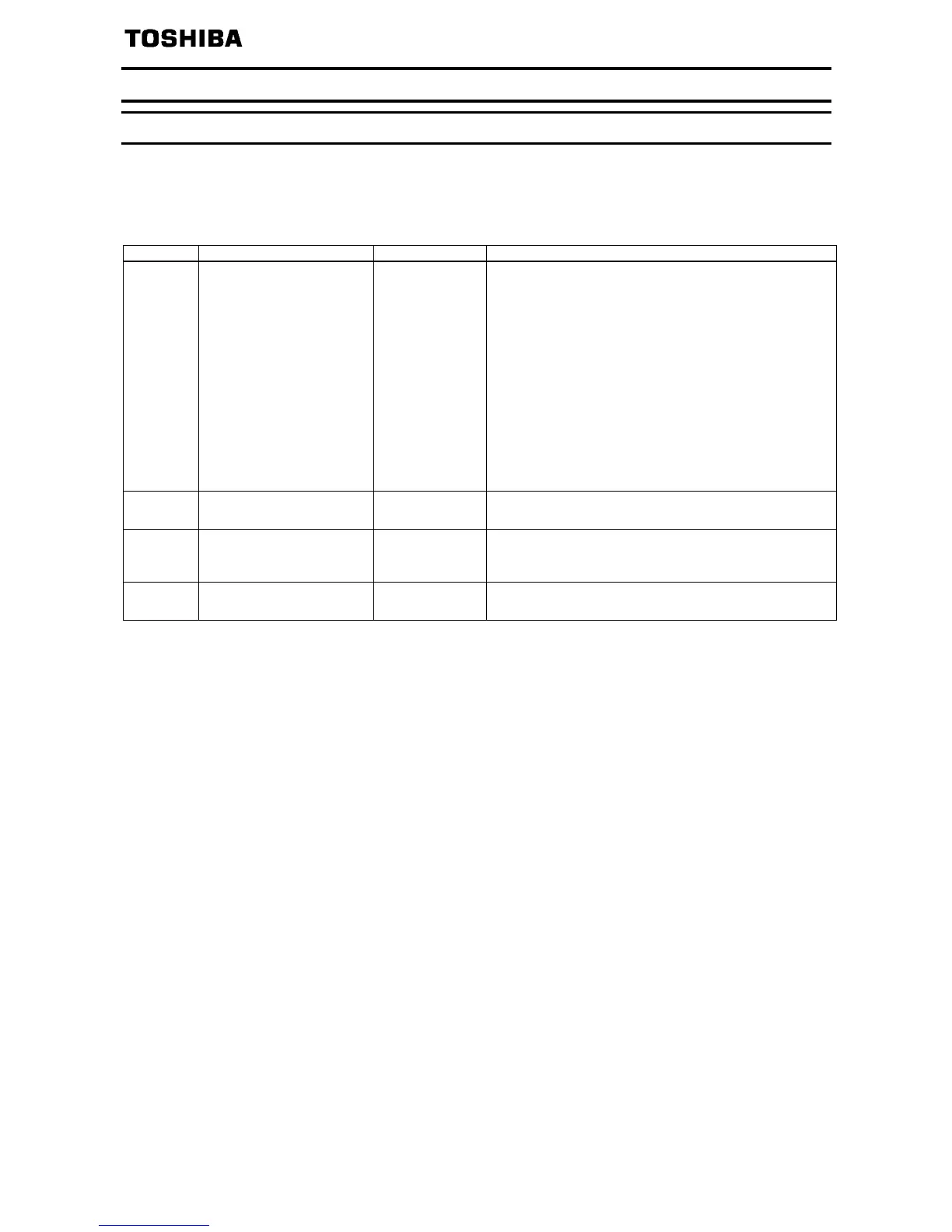
Title Function Setting range Description
c100
Communication error
detection delay time
0.0-100.0 sec
The waiting time from when a network error occurs
can be adjusted. If a network error continues past
the time set in c100, it is recognized as a
communication error and the operation of the drive
follows the setting of c101.
When normal communication returns during the
setting time, a communication error is not displayed
and operation is continued.
*The time unit time-out operates =
EtherCAT watchdog + c100 (communication
error detection delay time) [0.1s]
c101
Inverter operation at the
communications loss action
0-5
The operation of the drive when the communication
fault occurs can be specified.
c102
Preset speed operation
selection
0-15
The operation frequency of the drive when the
communication fault occurs can be specified. (Only
when c101 is set to 5)
c103
Communication time-out
condition selection
0-2
Select the communication time-out condition.
*The behavior of the drive in the system that connected two (or more) drive by the
EtherCAT network.
When the cable of OUT of drive at the first position is removed,
the drive at the first position did not detect communication abnormality.
The drive at the second position detected communication abnormality.
The master station was able to send data (LFRD) to drive at the fist position.
However, information (ETA and RFRD) on the drive was not able to be read.
It seems that TwinCAT’s problem.
 Loading...
Loading...










