E6581818
- 44 -
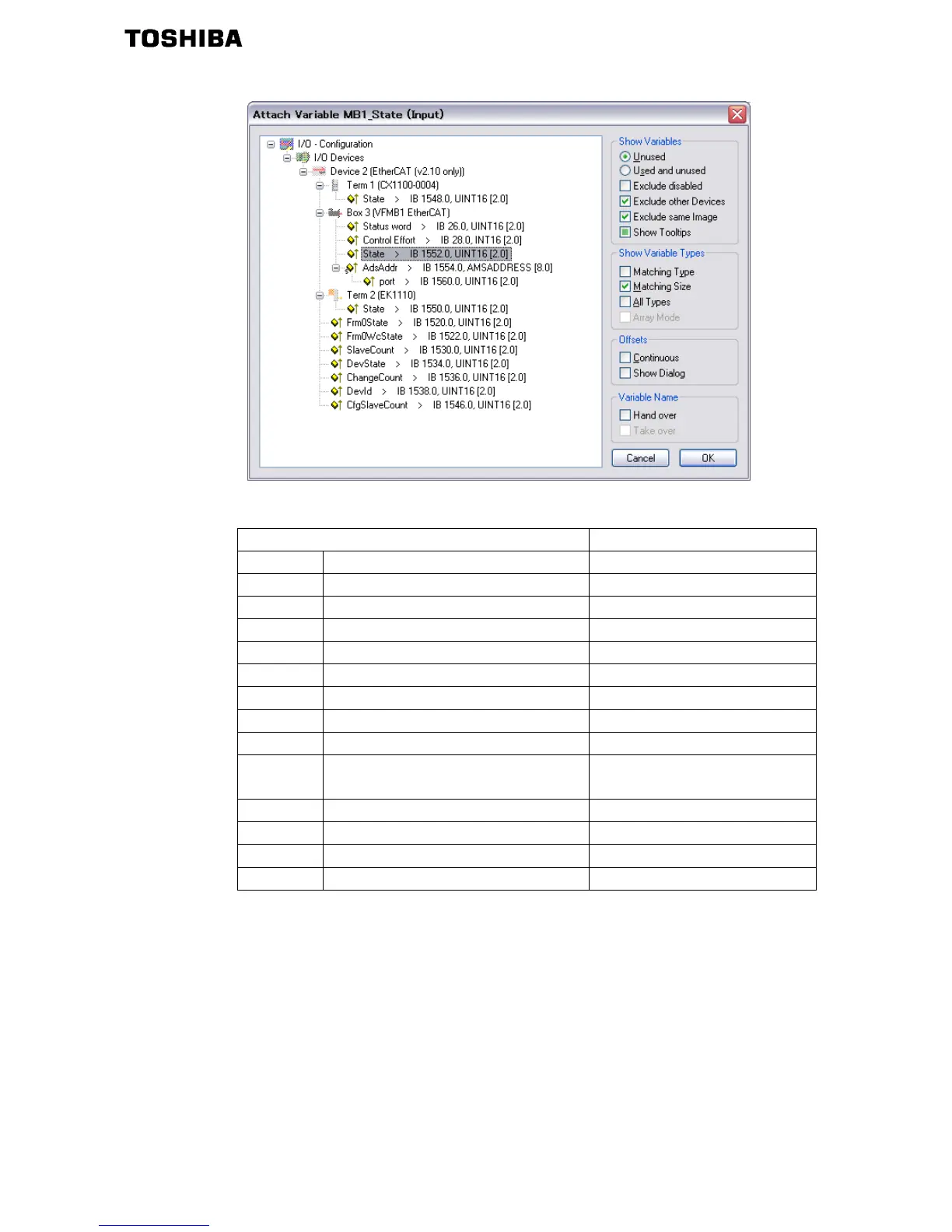
Example for “MB1_State”
Links to create
PLC – Configuration I/O - Configuration
Inputs MB1_State State
Inputs PLC_State DevState (with Device1)
Inputs MB1_TPDO_input1_Status_Word Status word
Inputs MB1_TPDO_input2_Control_Effort Control effort
Inputs MB1_TPDO_input3 Available for other parameter
Inputs MB1_TPDO_input4 Available for other parameter
Inputs MB1_TPDO_input5 Available for other parameter
Inputs MB1_TPDO_input6 Available for other parameter
Outputs MB1_RPDO_Output1_Control_Word Control word
Outputs MB1_RPDO_Output2_Target_Velocit
y
Target Velocity
Outputs MB1_RPDO_Output3 Available for other parameter
Outputs MB1_RPDO_Output4 Available for other parameter
Outputs MB1_RPDO_Output5 Available for other parameter
Outputs MB1_RPDO_Output6 Available for other parameter
Note: if more than 6 input or output parameters are created in TwinCAT
®
System
Manager, the MB1 will be blocked in “PreOp” State. The MB1 has maximum 6
TPDO and 6 RPDO.
Select: Actions -> Generate Mappings.
 Loading...
Loading...










