All rights reserved 27 Service Manual e-Series (EN) 1.1.8
4.1.2 General Guidance to Separate Joint from Counterpart
WARNING
Before replacing ANY components inside the Control Box, it is important to completely
shut it down first. Follow the first 3 steps in.6.5 Complete rebooting sequence.
NOTICE
Exercise caution when handling ESD sensitive parts. See Section 2.Handling ESD-
Sensitive Parts
Disassemble:
1. Before repairing the robot, make sure the necessary tools are available.
1.1. Service tools with torque tools, ESD Wristband, etc.
1.2. If you must disassemble the Robot Arm you will need:
new flat rings, wear rings, M3 and M4 tap tool("roll tap" or "forming tap") for threads,
pre-coated screws, or Loctite.
MANDATORY ACTION
Before continuing, read the complete guide in this manual.
2. Move the robot to an appropriate position for disassembly.
3. Shut down the Control Box and remove the main power.
4. If necessary, dismount the entire Robot Arm from the work cell and place on a solid
surface.
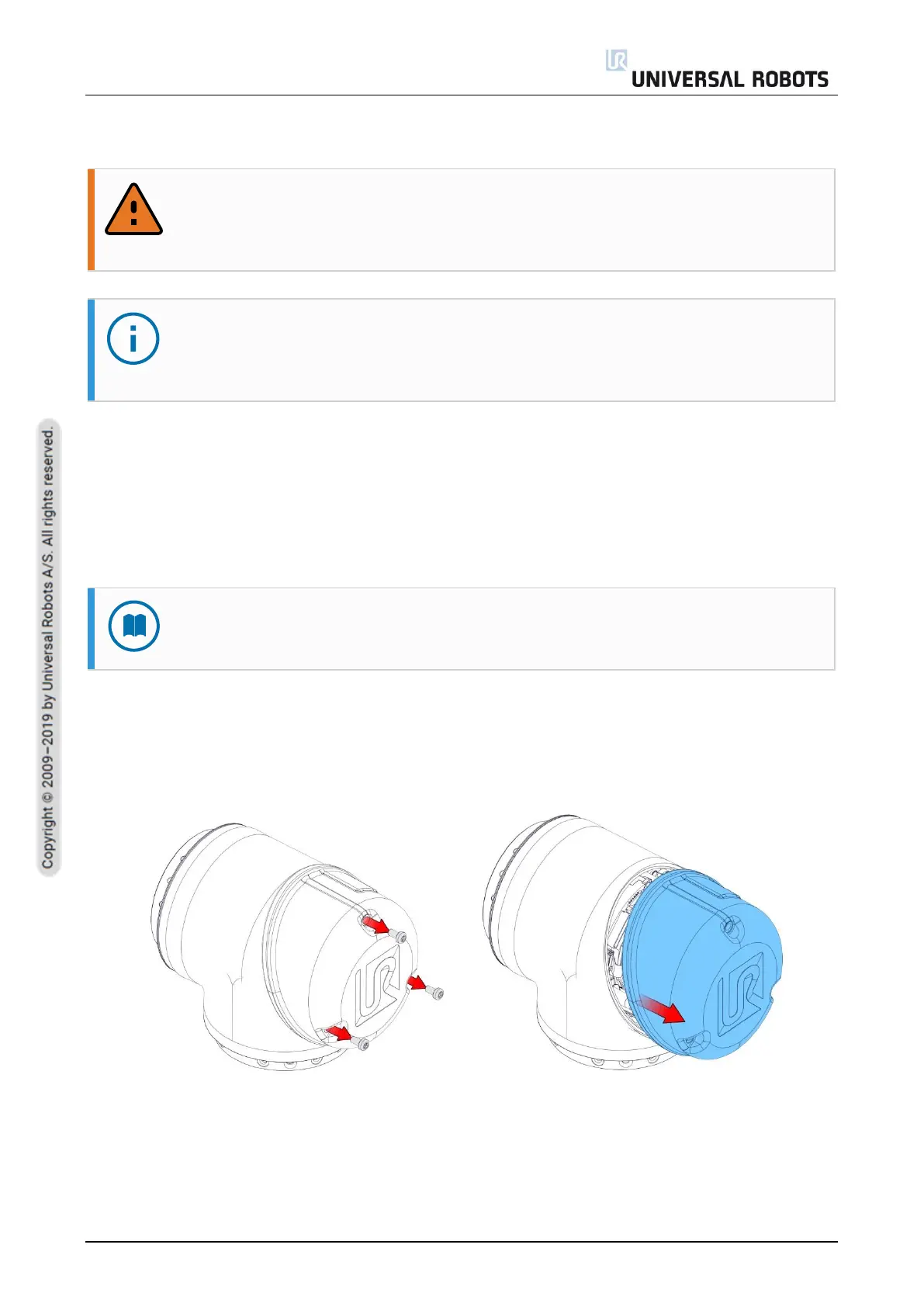
5. Remove screws and the blue lid.

 Loading...
Loading...












