All rights reserved 46 Service Manual e-Series (EN) 1.1.8
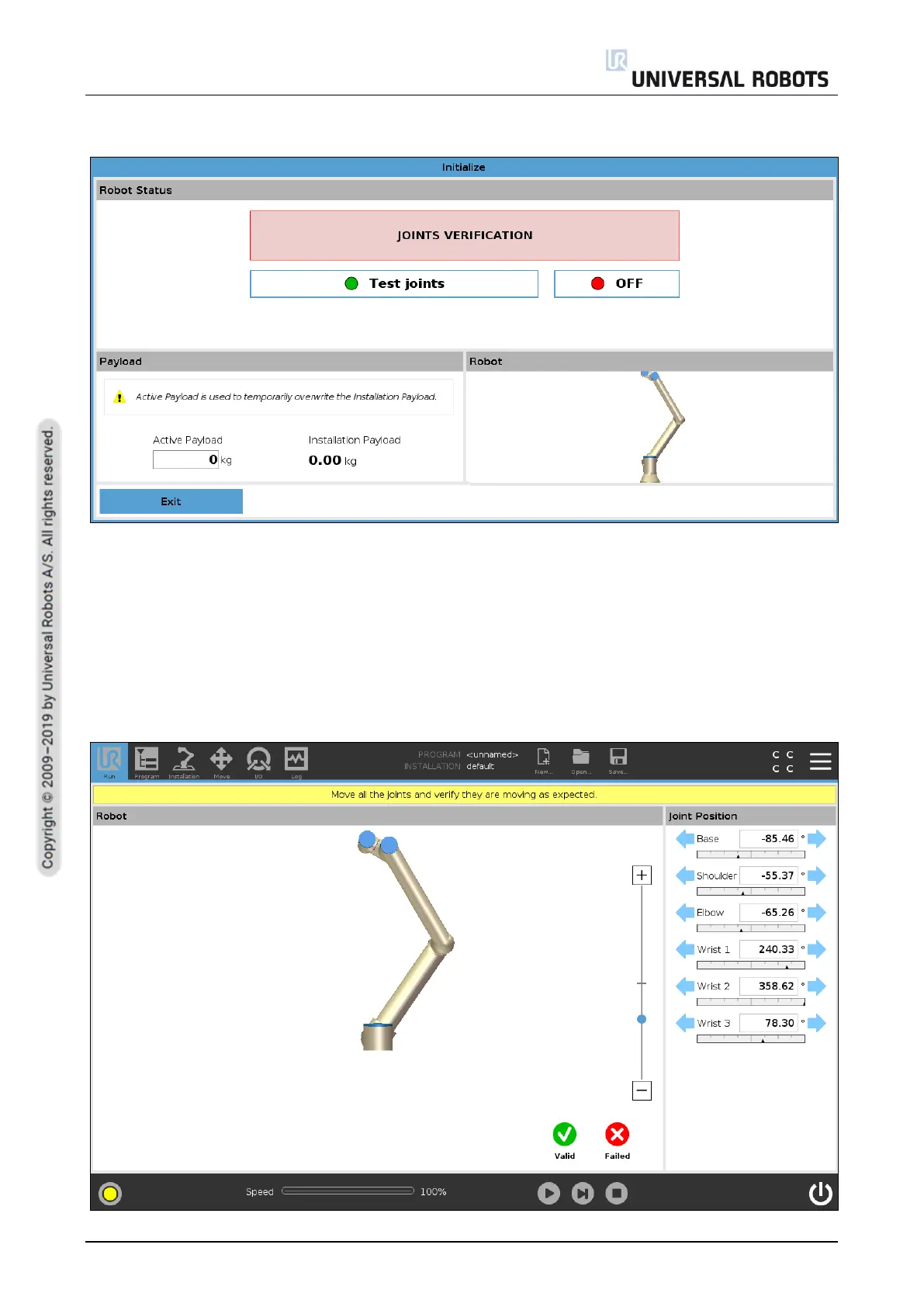
3. Press Test Joints to start joint verification.
4. Move all joints with the arrows respective to each joint.
a. If joints move as expected, press Valid and a popup appears. Follow the popup
instructions.
b. If joints did not move as expected (i.e., wrong joint moves or incorrect direction),
press Failed and a popup appears. Follow the popup instructions.