less than (level-hysteresis)
[encoder unit] at the last
second gain, wait until
P1-15 remain in this state,
and return to the first gain.
first
second
first
Waiting
time
Position
command
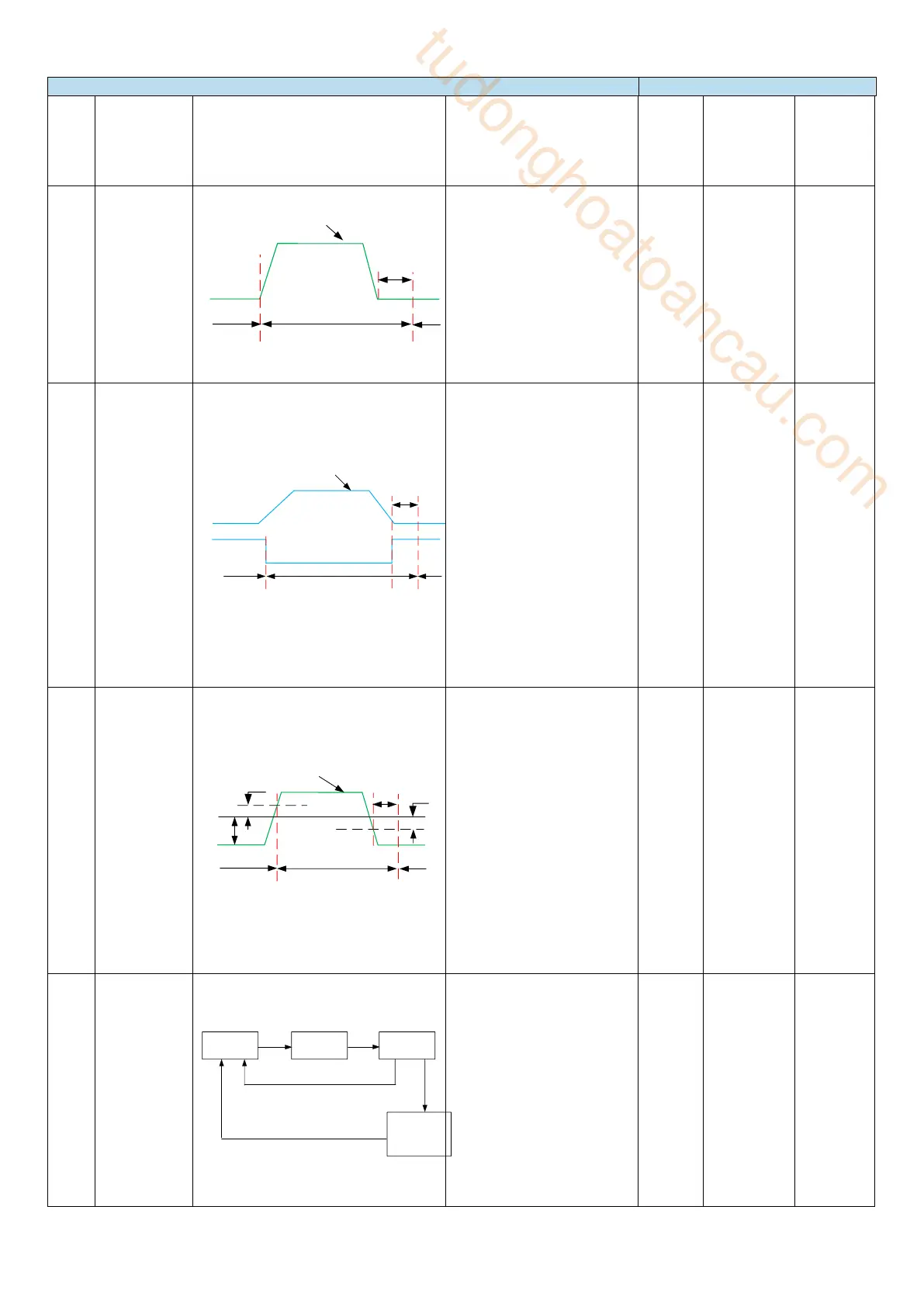
Valid only in position mode
(other modes are fixed as
the first gain)
At the last first gain, if the
position command is not 0,
switch to the second gain.
At the last second gain, if
the position command is in
the state of 0 which remains
in the waiting time P1-15, it
returns to the first gain.
Position
command
Waiting
time
first
second
first
Positioning
completion signal
Valid only in position mode
(other modes are fixed as
the first gain)
At the last first gain, if the
positioning is not
completed, switch to the
second gain.
At the last second gain, if
the state of positioning
completion remains in this
state for the waiting time
P1-15, the first gain is
returned. Note: it is
necessary to set the
positioning completion
detection mode according
to P5-01.
Threshold
hysteresis
Threshold
hysteresis
Level
threshold
first
second
first
Speed
feedback
Waiting
time
Valid only in position mode
(other modes are fixed as
the first gain):
At the last first gain, the
absolute value of the actual
speed exceeds (level +
hysteresis) [RPM],
switching to the second
gain.
At the last second gain,
when the absolute value of
the inter speed is less than
(level-hysteresis) [RPM],
wait until P1-15 remain in
this state, and return to the
first gain.
Position
command+
actual speed
First gain
when static
Second gain
when action
Command
pulses
Second gain
when stable
No command pulse
duration delay time
Near rest
only speed
integral second
gain/
Other first gain
丨Actual speed丨<
Switching level
丨Actual speed丨< (switching level-
switching delay)
丨Actual speed丨<(switching level-
Switching delay)
Valid only in position mode
(other modes are fixed as
the first gain):
At the last first gain, if the
position command is not 0,
switch to the second gain.
At the last second gain, the
state in which the position
command is 0 within the
waiting time P1-15,
maintains the second gain.
When the position
command is 0 and the
tudonghoatoancau.com
 Loading...
Loading...

