4.2 USER CONSTANT (MEMORY SWITCH) SETUP
(Cn-01 to On-02) AND MONITOR (Cont'd)
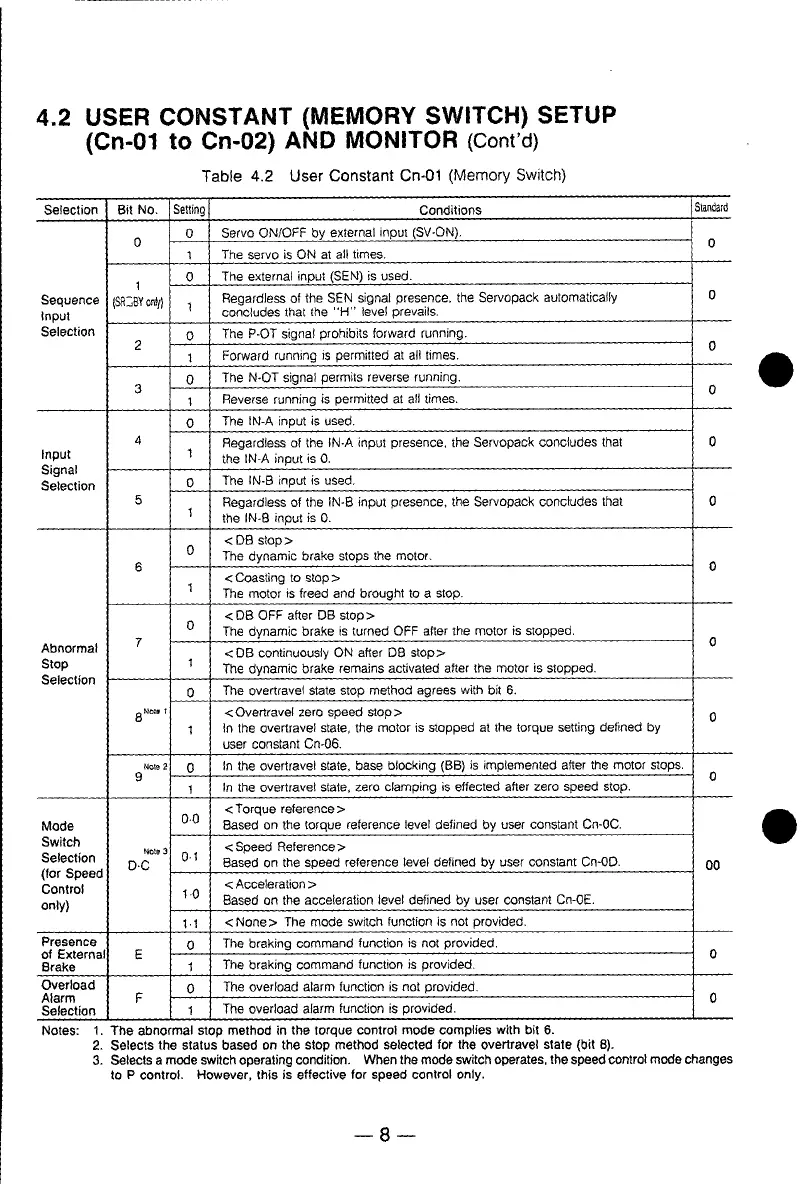
Table 4.2 User Constant Cn-01 (Memory Switch)
Selection Bit No. Setting Conditions Standard
0 Servo ON/OFF by external input (SV-ON).
0 0
1 The servo is ON at all times.
0 The external input (SEN) is used.
1
Sequence (SP,SBY0nf_) 1 Regardless of the SEN signal presence, the Servopack automatically 0
Input concludes that the "H" level prevails.
Selection 0 The P-OT signal prohibits forward running.
2 0
1 Forward running is permitted at all times.
3 0 The N-OT signal permits reverse running.
0
I Reverse running is permitted at all times.
0 The IN-A input is used.
4 Regardless of the IN-A input presence, the Servopack concludes that 0
Input 1 the IN-A input is 0.
Signal
Selection 0 The IN-B input is used.
5 Regardless of the IN-B input presence, the Servopaek concludes that 0
I the IN.B input is 0.
<DB stop>
0 The dynamic brake stops the motor.
6 0
<Coasting to stop>
1 The motor is freed and brought to a stop.
<DB OFF after DB stop>
0 The dynamic brake is turned OFF after the motor is stopped.
Abnormal 7 <DB continuously ON after O8 stop> 0
Stop 1 The dynamic brake remains activated after the motor is stopped.
Selection
0 The overtravel state stop method agrees with bit 6.
8"o_T <Over[ravelzerospeedstop> 0
1 In the overtravel state, the motor is stopped at the torque setting defined by
user constant Cn-06.
_" _ 0 In the overtravel state, base blocking (BB) is implemented after the motor stops.
9 0
t In the overtravel state, zero clamping is effected after zero speed stop.
<Torque reference>
Mode 0.0 Based on the torque reference level defined by user constant Cn-0C.
Switch <Speed Reference>
Selection _o_e3 0. t
D.C Based on the speed reference level defined by user constant Cn-OD. 00
(for Speed
< Acceleration >
Control t .0
only) Based on the acceleration level defined by user constant Cn-0E.
1.1 < None > The mode switch function is not provided.
Presence 0 The braking command function is not provided.
of External E 0
Brake 1 The braking command function is provided.
Overload 0 The overload alarm function is not provided.
Alarm F 0
Selection 1 The overload alarm function is provided.
Notes: 1. The abnormal stop method in the torque control mode complies with bit 6.
2. Selects the status based on the stop method selected for the overtravel state (bit 8),
3. Selects a mode switch operating condition. When the mode switch operates, the speed control mode changes
to P Control. However, this is effective for speed control only.
8

 Loading...
Loading...