User Constants
7.1.7 Memory Switches
• The motor decelerats to a stop with the torque specified in the emergency stop torque constant
(Cn-0006) when Cn-0001 bit 8 is set to 1.
■ Cn-0001 Bit 9: Holding Method After An Emergency Torque
Deceleration Stop at Overtravel
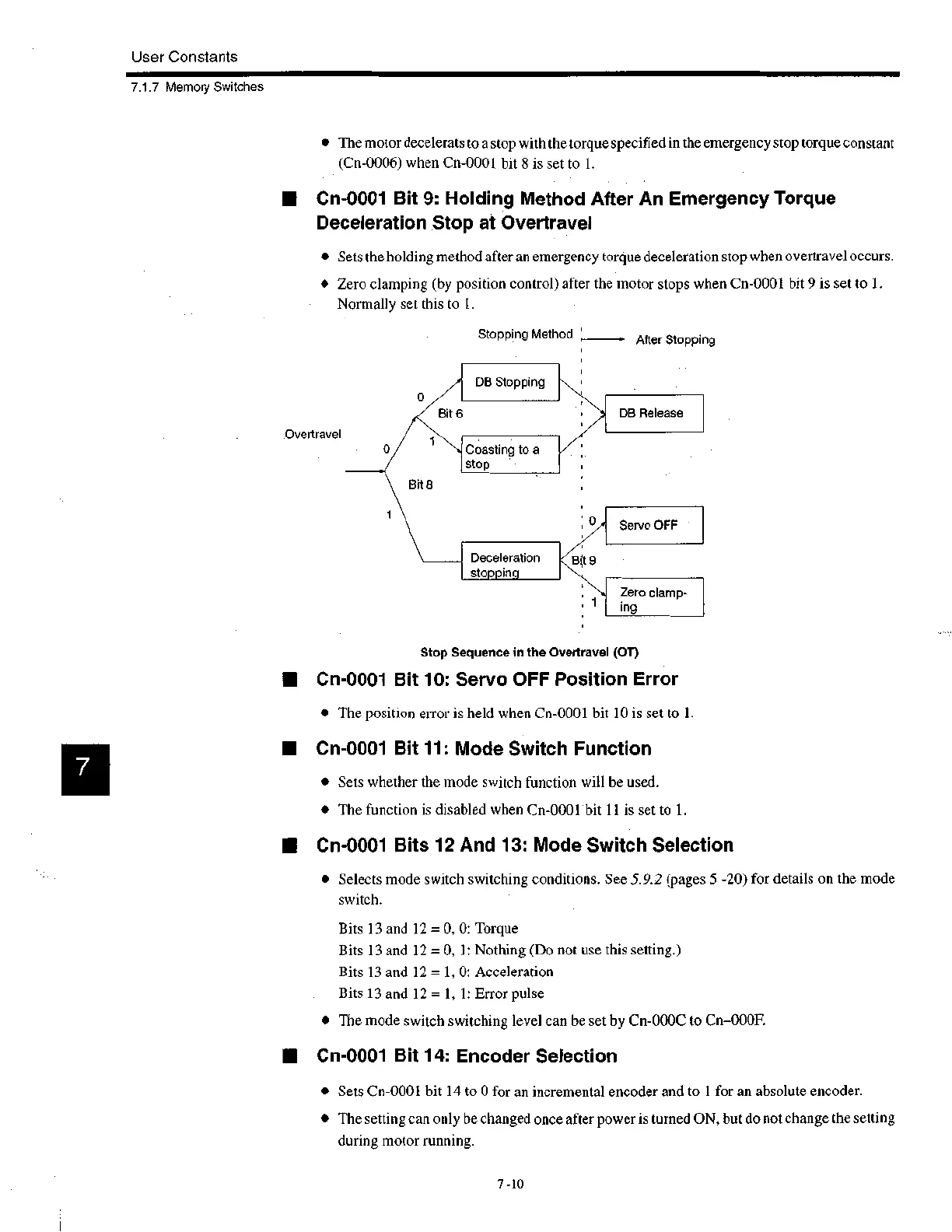
• Sets the holding method after an emergency torque deceleration stop when overtravel occurs.
• Zero clamping (by position control) after the motor stops when Cn-0001 bit 9 is set to 1.
Normally set this to 1.
Stopping Method After Stopping
DB Stopping
Overtravel
Bit 8
Bit 6
Coasting to a
stop
Deceleration
stopping
Eqt 9
DB Release
Servo OFF
Zero clamp-
ing
Stop Sequence in the Overtravel (OT)
■ Cn-0001 Bit 10: Servo OFF Position Error
• The position error is held when Cn-0001 bit 10 is set to 1.
■ Cn-0001 Bit 11: Mode Switch Function
• Sets whether the mode switch function will be used.
• The function is disabled when Cn-0001 bit 11 is set to 1.
■ Cn-0001 Bits 12 And 13: Mode Switch Selection
• Selects mode switch switching conditions. See 5.9.2 (pages 5 -20) for details on the mode
switch.
Bits 13 and 12 = 0, 0: Torque
Bits 13 and 12 = 0, 1: Nothing (Do not use this setting.)
Bits 13 and 12 = 1, 0: Acceleration
Bits 13 and 12 = 1, 1: Error pulse
• The mode switch switching level can be set by Cn-000C to Cn-000F.
■ Cn-0001 Bit 14: Encoder Selection
• Sets Cn-0001 bit 14 to 0 for an incremental encoder and to 1 for an absolute encoder.
• The setting can only be changed once after power is turned ON, but do not change the setting
during motor running.
7 -10
 Loading...
Loading...






