References
Documentation referred to in the manual, is listed in the table below.
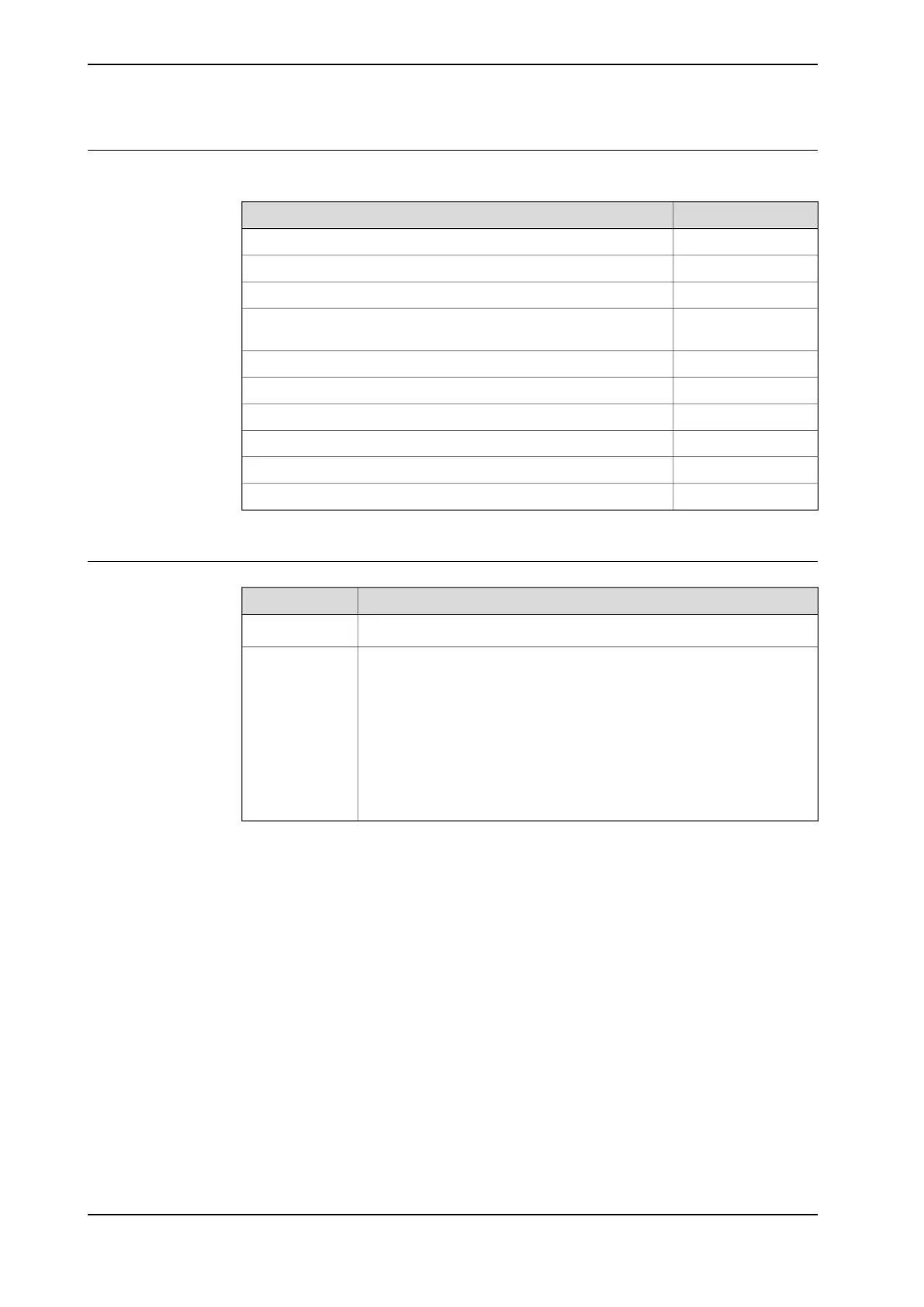
Document IDDocument name
3HAC081965-001Product manual, spare parts - IRB 1010
3HAC081966-001Product specification - IRB 1010
3HAC080051-003Circuit diagram - IRB 1010
3HAC031045-001Safety manual for robot - Manipulator and IRC5 or OmniCore con-
troller
i
3HAC079399-001Product manual - OmniCore E10
3HAC065036-001Operating manual - OmniCore
3HAC066554-001Application manual - Controller software OmniCore
3HAC066553-001Technical reference manual - Event logs for RobotWare 7
3HAC042927-001Technical reference manual - Lubrication in gearboxes
3HAC065041-001Technical reference manual - System parameters
i
This manual contains all safety instructions from the product manuals for the manipulators and the
controllers.
Revisions
DescriptionRevision
First edition.A
Published in release 22D. The following updates are done in this revision:B
• Added information about Wrist Optimization in calibration chapter.
• Updated the description about calibration tool used for axis calib-
ration.
• Updated the procedure of securing the cable package in axis 4
during spare part replacement.
• Minor editorial changes.
10 Product manual - IRB 1010
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
Overview of this manual
Continued