3.3 On-site installation
3.3.1 Lifting the robot
3.3.1.1 Lifting the robot by one person
General
This section describes how to lift the robot and move it by one person.
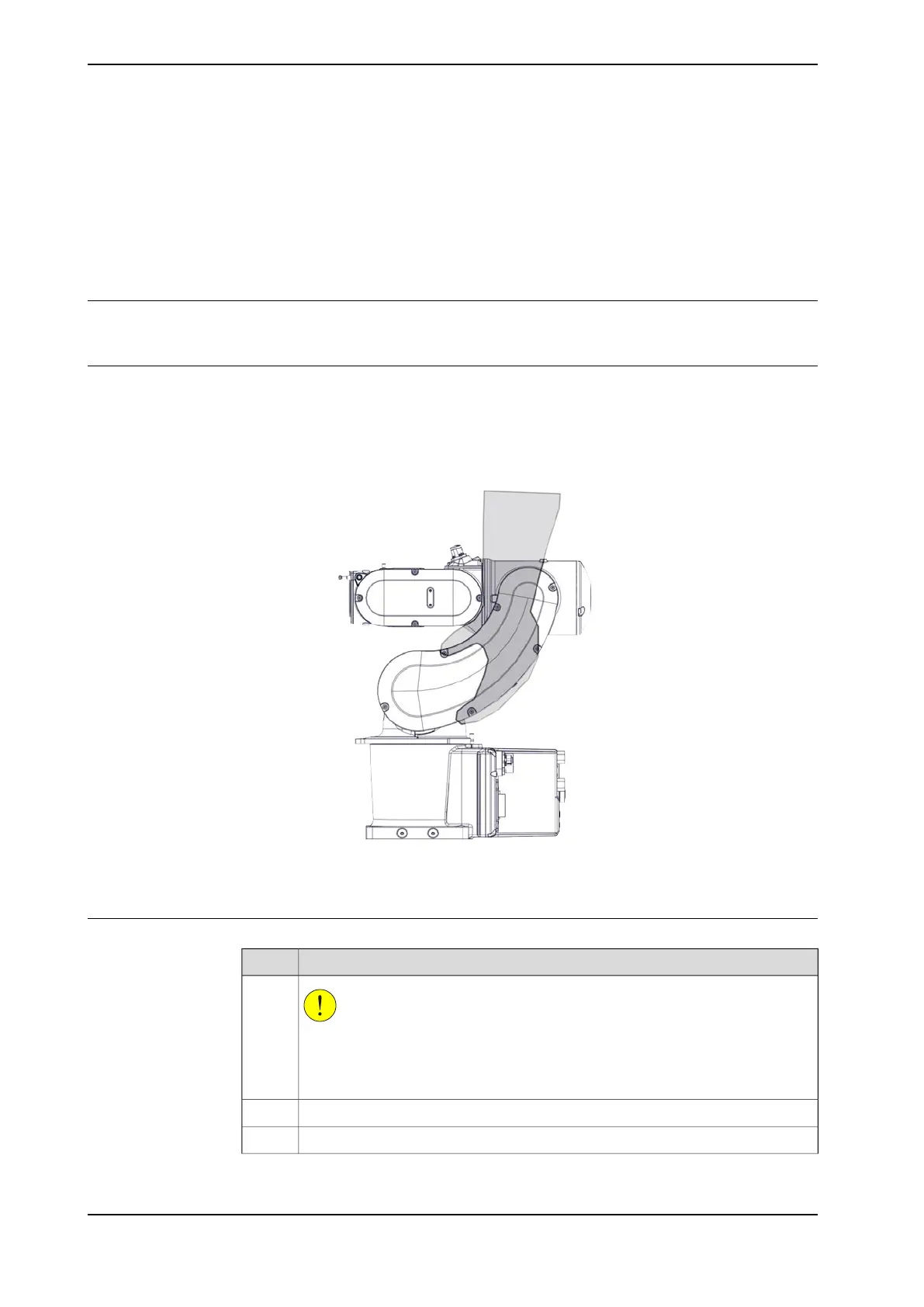
Grasping location
When moving the IRB 1010, stands behinds the robot (base rear side) and holds
the lower part of the arm.
The following figure illustrates the recommended grasping location of the robot.
xx2200000196
Lifting and transporting the robot
Action
CAUTION
The IRB 1010 weighs,
13.5 kg
and can be lifted by one person.
1
Grasp the robot as instructed in Grasping location on page 50.2
Lift the robot.3
Continues on next page
50 Product manual - IRB 1010
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.1.1 Lifting the robot by one person