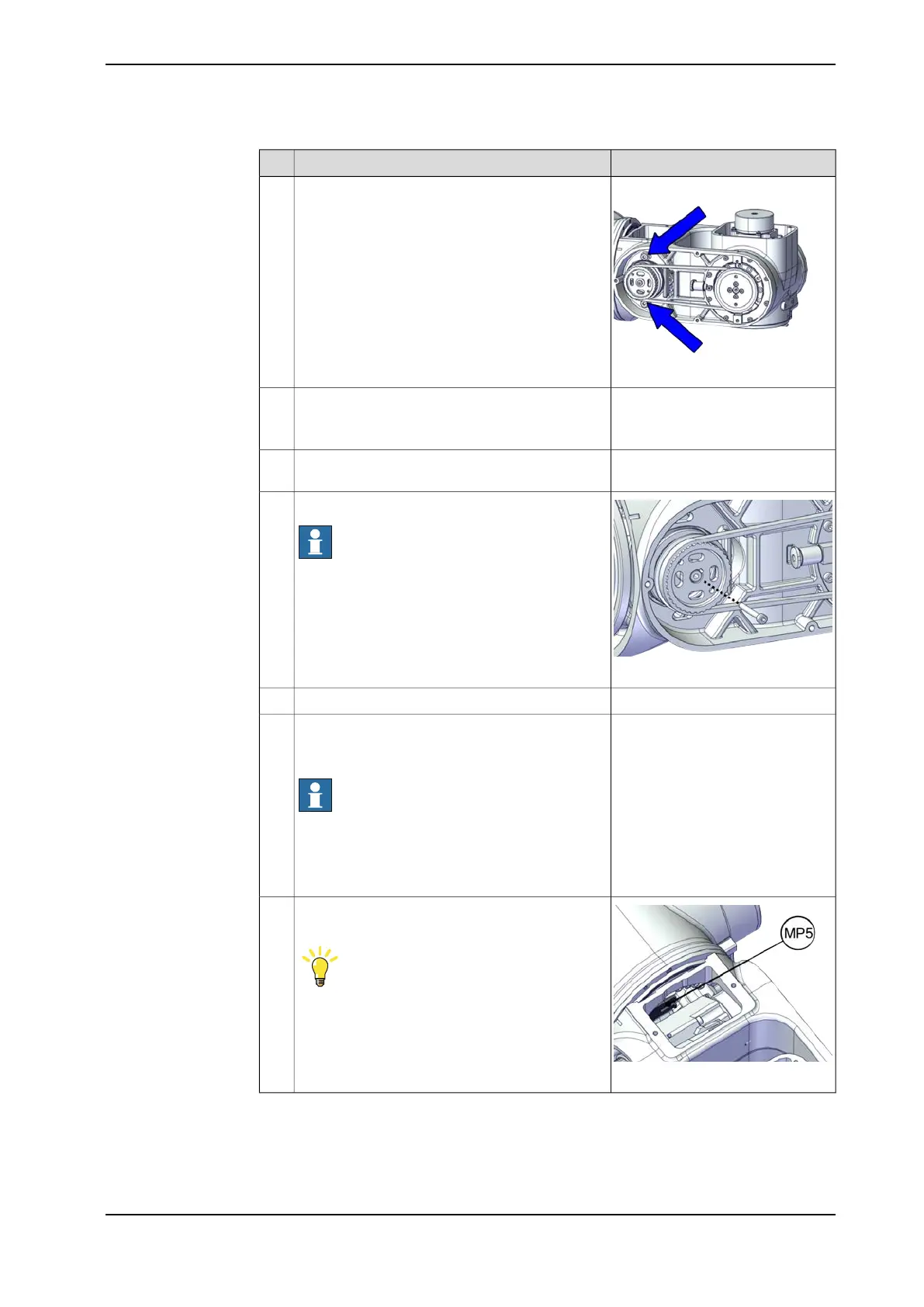
NoteAction
Tightening torque: 2.8 NmSecure the motor with the screws.11
xx2200000042
Used belt: 123-131 HzUse a sonic tension meter to measure the timing
belt tension.
12
New belt:132-169 Hz (for reference
only)
If the timing belt tension does not meet the require-
ment, loosen the motor screws and readjust.
13
xx2200000547
Remove the adjustment screw from the motor.
Note
Pay attention to the screw turning direction. Incor-
rect direction may weaken the brake capacity of
the motor.
14
Tightening torque: 0.8 NmRefit the pulley screw.15
Connect the power supply to axis-4 motor and
release the axis-4 brake to move the axis 4 to zero
position. Then, disconnect the power supply.
Note
The robot is not connected to the controller during
replacement, power must be supplied to the con-
nector R1.MP according to the section Supplying
power to connector R1.MP on page 56.
16
xx2200000040
Reconnect the connectors.
• MP5
Tip
See the number markings on the connectors for
help to find the corresponding connector.
17
Continues on next page
Product manual - IRB 1010 221
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
5 Repair
5.4.3 Replacing the axis 3-4 assembly unit
Continued