NoteAction
The FlexPendant will give all inform-
ation needed to proceed with Axis
Calibration.
The calibration method used at ABB factory for
each axis is shown, as well as calibration method
used for the robot during last field calibration.
3
Valid for RobotWare 74
Tap Calibration Methods on the right pane and
then tap Calibration. The software will automatic-
ally call for the procedure for the valid calibration
method.
A brief overview of the sequence
that will be run on the FlexPendant
is given in Overview of the calibra-
tion procedure on the FlexPendant
on page 295.
Follow the instructions given on the FlexPendant.5
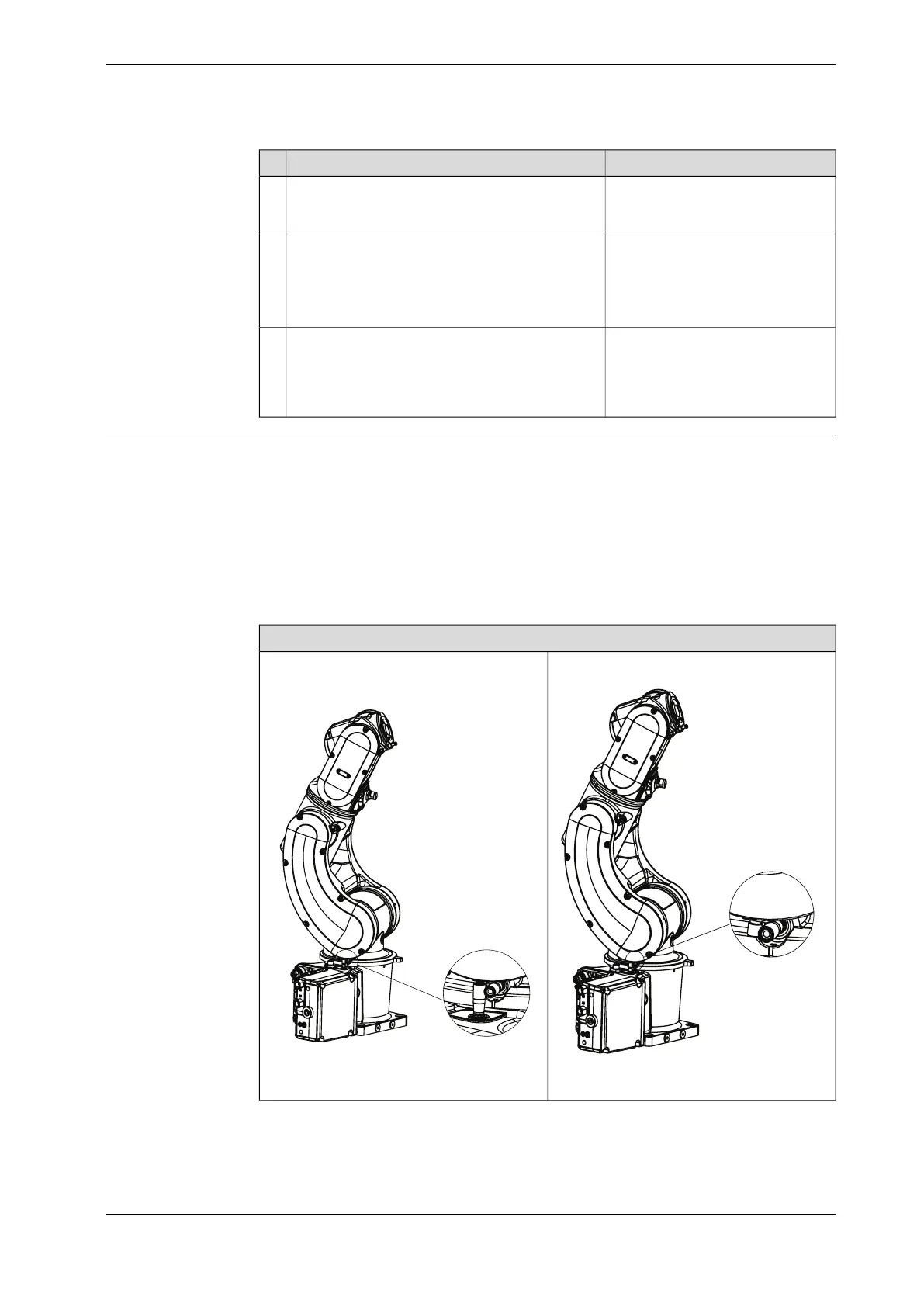
Fitting of calibration tools
The figures show the calibration tool in contact with the fixed pin on each axis.
The position of the complete robot shown for each axis is only an example.
In order for the axis to be able to be moved to calibration position, or in order for
getting proper access to the calibration bushing, other axes might need to be
jogged to positions different from 0 degrees. Information about which axes are
allowed to be jogged will be given on the FlexPendant. These axes are marked
with Unrestricted in the FlexPendant window.
Calibration tools in contact
Axis 2Axis 1
xx2200000183
xx2200000182
Continues on next page
Product manual - IRB 1010 297
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
6 Calibration
6.4.4 Axis Calibration - Running the calibration procedure
Continued