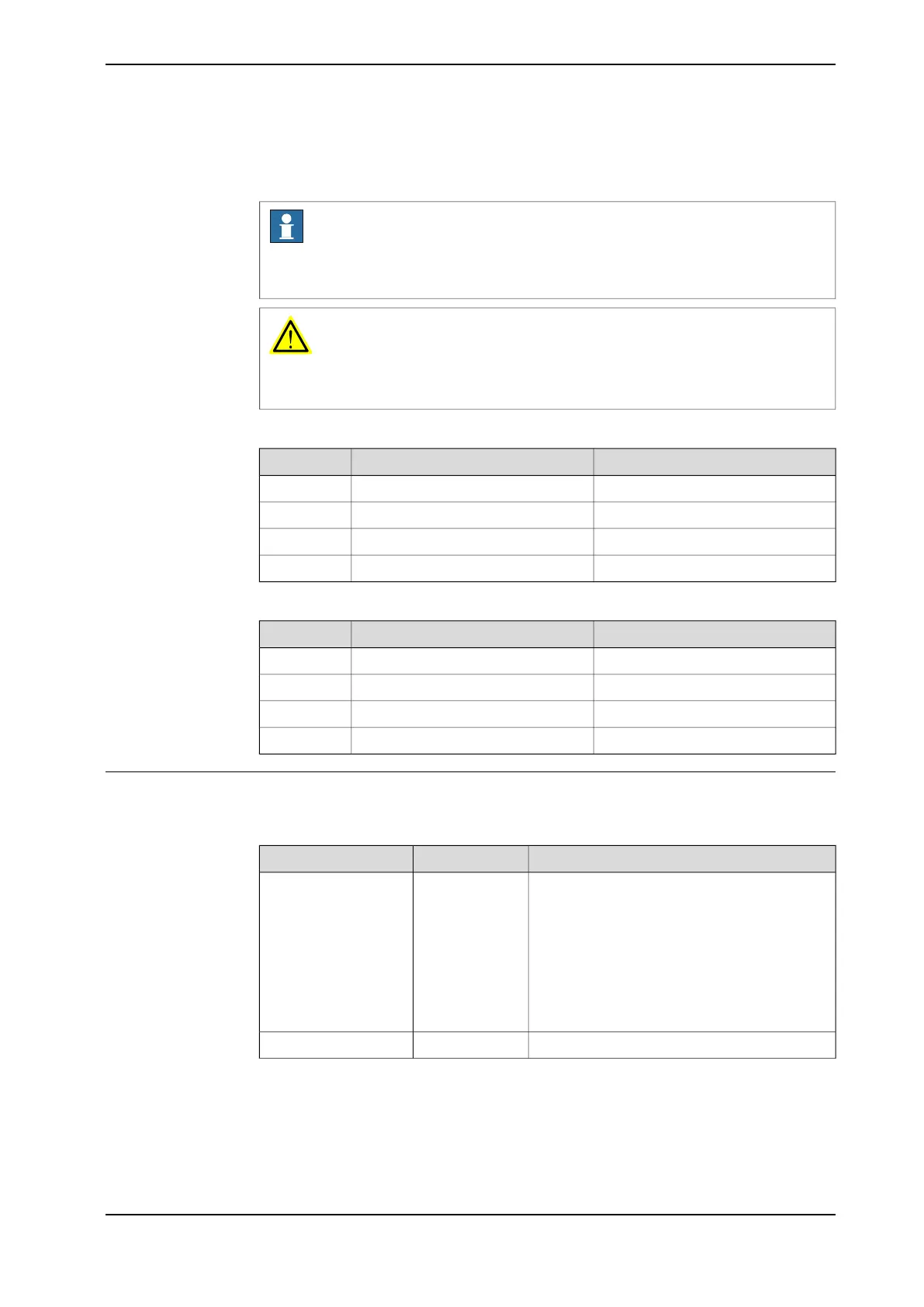
The table shows the various forces and torques working on the robot during different
kinds of operation.
Note
These forces and torques are extreme values that are rarely encountered during
operation. The values also never reach their maximum at the same time!
WARNING
The robot installation is restricted to the mounting options given in following load
table(s).
Floor mounted
Maximum load (emergency stop)Endurance load (in operation)Force
264 N150 NForce xy
353 N200 NForce z
121 Nm70 NmTorque xy
51 Nm30 NmTorque z
Suspended
Max. load (emergency stop)Endurance load (in operation)Force
340 N150 NForce xy
493 N340 NForce z
121 Nm70 NmTorque xy
51 Nm30 NmTorque z
Requirements, foundation
The table shows the requirements for the foundation where the weight of the
installed robot is included:
NoteValueRequirement
Flat foundations give better repeatability of the
resolver calibration compared to original settings
on delivery from ABB.
0.1/500 mmFlatness of foundation
surface
The value for levelness aims at the circumstance
of the anchoring points in the robot base.
In order to compensate for an uneven surface,
the robot can be recalibrated during installation.
If resolver/encoder calibration is changed this
will influence the absolute accuracy.
5°Maximum tilt
Continues on next page
Product manual - IRB 1010 39
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
2 Manipulator description
2.2 Technical data
Continued