Agilent InfinityLab LC Series Vialsamplers User Manual 26
1Introduction
Operating Principle
Transport Assembly
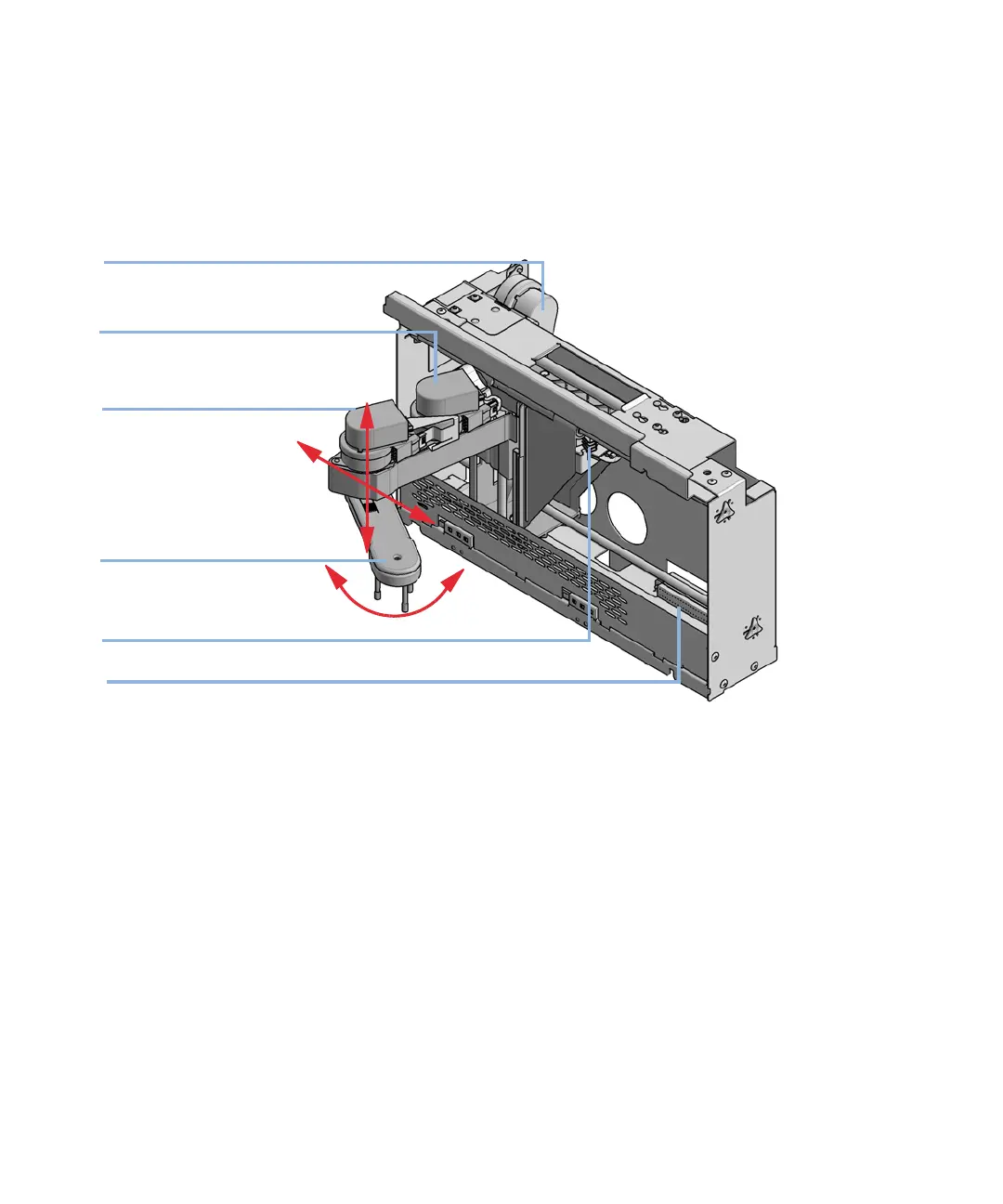
The transport unit comprises an X-axis slide (left-right motion), a Z-axis arm
(up-down motion), and a gripper assembly (rotation and vial-gripping).
Figure 10 Transport Assembly
The transport assembly uses four stepper motors driven in closed-loop mode for
accurate positioning of the gripper assembly. The rotational movement of the
motors is converted to linear motion (X- and Z-axes) by toothed belts connected
to the drive spindles. The rotation (theta axes) of the gripper assembly is
transferred from the motor by a toothed belt and series of gears. The opening
and closing of the gripper fingers are driven by a stepper motor linked by a
toothed belt to the planetary gearing inside the gripper assembly.
The stepper motor positions are determined by the optical encoders mounted
onto the stepper-motor housing. The encoders monitor the position of the
motors continually, and correct for position errors automatically (e.g. if the
gripper is accidentally moved out of position when loading vials into the vial tray).
The initialization positions of the moving components are sensed by reflection
sensors mounted on the flex board. These positions are used by the processor to
calculate the actual motor position. An additional six reflection sensors for tray
recognition are mounted on the flex board at the front of the assembly.
X motor
Theta motor
Gripper motor
Gripper arm
Z motor
Flex board
Theta axis
X axis
Z axis
 Loading...
Loading...