33
3.7.2.2 3D Lidar Autonomous Navigation
roslaunch scout_bringup open_rslidar.launch
roslaunch scout_bringup gmapping.launch
SLAM Mapping:
(1)Start the lidar and publish the coordinate transformation of base_link-><laser_link>
(2)Start gmapping mapping node
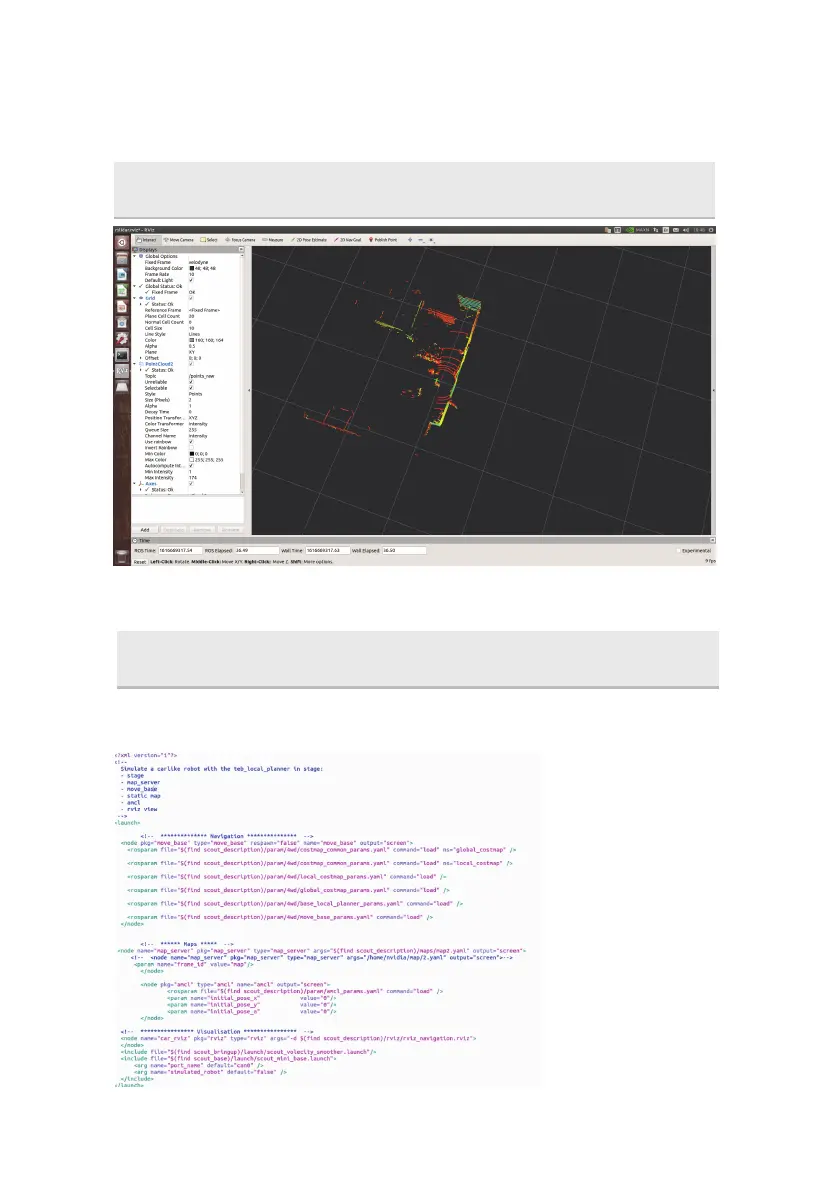
Note: If you need to choose different map, please open the navigation.launch file to modify the
parameters which is marked with red line as shown in the figure below.