34
rosrun map_server map_saver ‒f ~/catkin_ws/scout _base/scout_description/maps/map
(3)Use the remote control to control the Kit to move around the scene. After building the map,
save the map to the specified directory (usually /description)
roslaunch scout_bringup open_rslidar.launch
roslaunch scout_bringup navigation.launch
Autonomous Navigation:
(1)Start the lidar and publish the coordinate transformation of base_link-><laser_link>
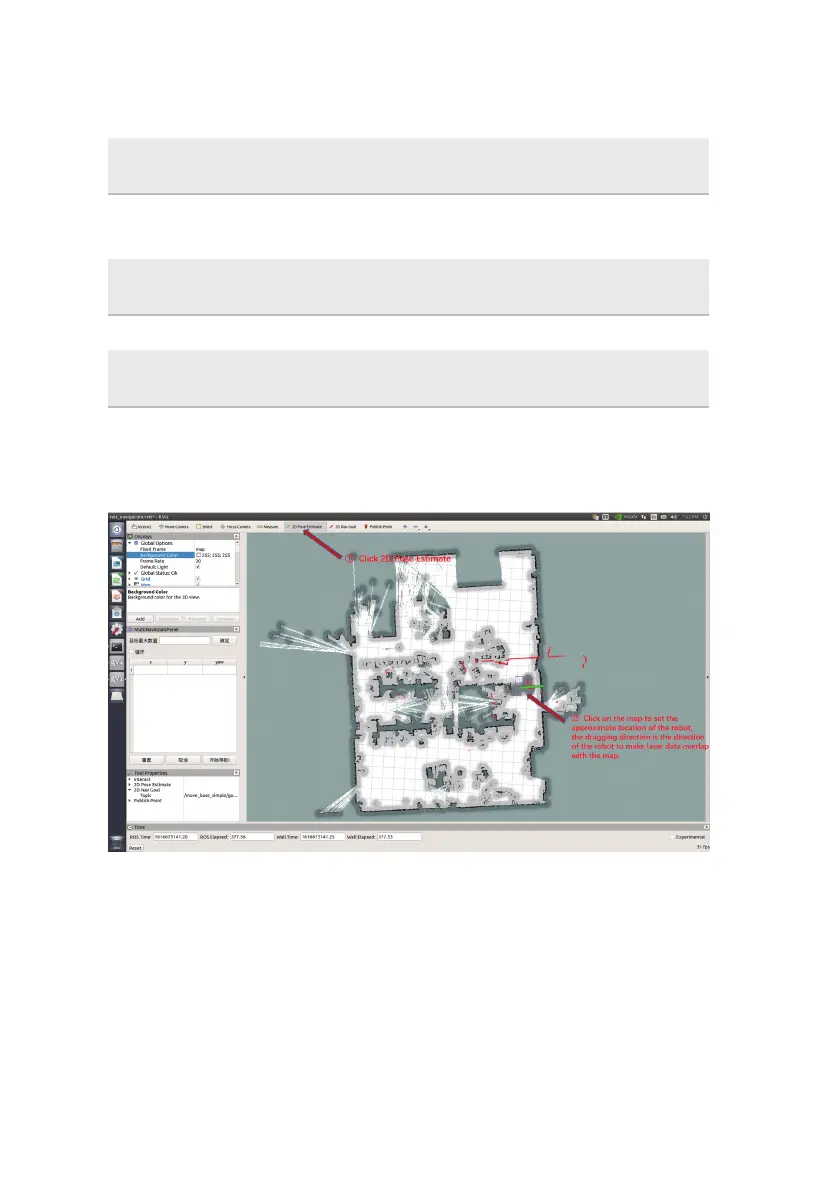
(4)Regulate the actual position of the robot on the map displayed in rviz, and regulate the chassis
rotation by publishing an approximate position with the handle. When the laser shape overlaps
with the scene shape in the map, the regulation is complete.
(2)Start move_base navigation

 Loading...
Loading...