310 Rockwell Automation Publication 750-PM001N-EN-P - February 2017
Chapter 6 Troubleshooting
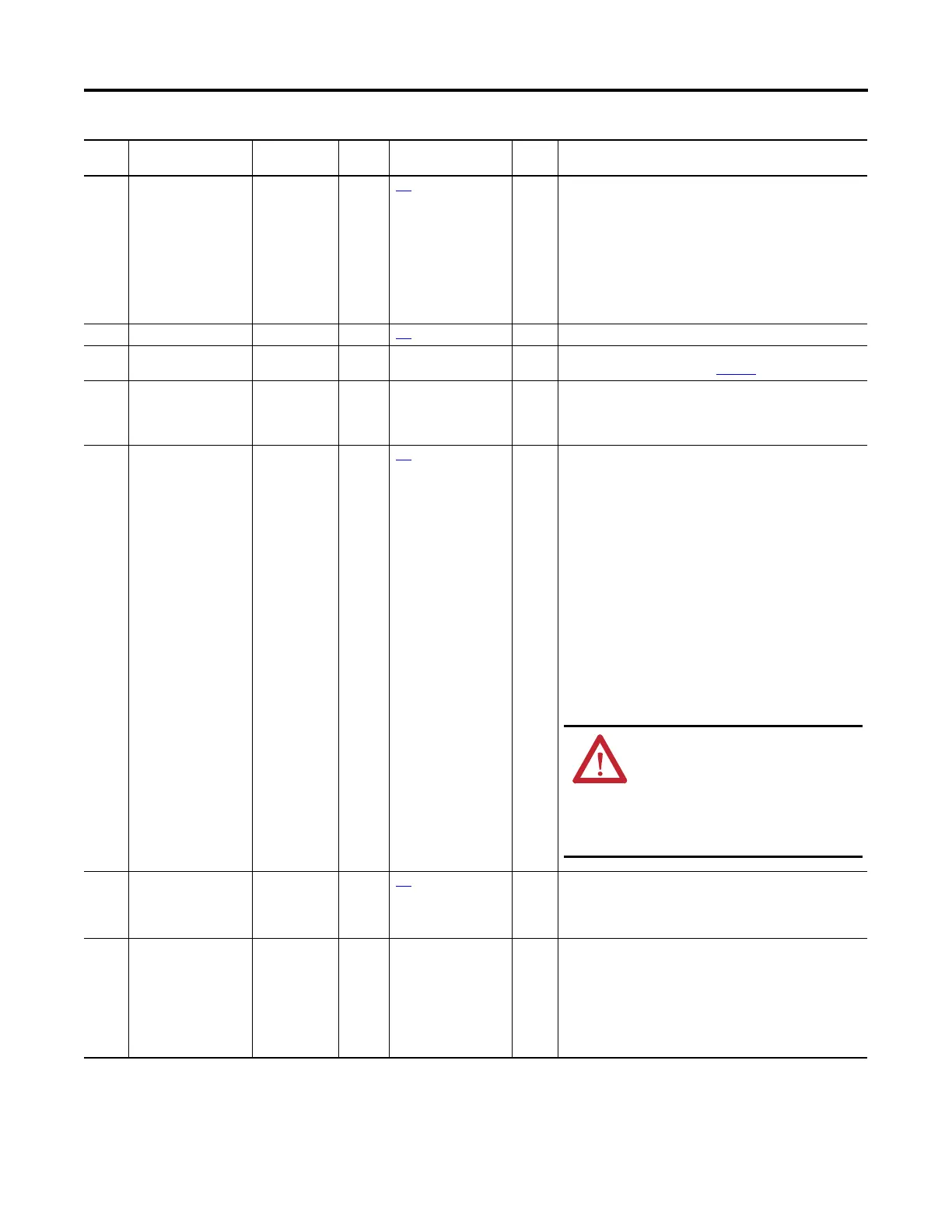
17 Input Phase Loss Configurable 462
[InPhase LossActn] The DC bus ripple has exceeded a preset level. Make these checks and
adjustments in this order.
• Check input impedance balance.
• Increase the setting of P463 [InPhase Loss Lvl] to make the drive
less sensitive.
• Tune the bus regulator or speed regulator to mitigate the effects of
dynamic cyclic loads on DC bus ripple.
• Disable the fault by setting P462 [InPhase LossActn] to 0 “Ignore”
and use an external phase loss detector such as a Bulletin 809S
relay.
18 Motor PTC Trip Configurable 250 [PTC Cfg] Motor PTC (Positive Temperature Coefficient) over temperature.
19 Task Overrun Alarm 1 System resource utilization is at or above 90 % of capacity. Review the
system resource allocation table on page 307
.
20 TorqPrv Spd Band Resettable Fault Coast The difference between P2 [Commanded SpdRef] and P3 [Mtr Vel
Fdbk] has exceeded the level programmed in P1105 [Speed Dev
Band] for a time period greater than the time programmed in P1106
[SpdBand Intgrtr].
21 Output PhaseLoss Configurable 444
[OutPhaseLossActn] The current in one or more phases has been lost or remains below the
threshold set in P445 [Out PhaseLossLvl] for 1 second. Decreasing the
threshold makes the drive less sensitive to tripping. A deceased
threshold is necessary when the motor is smaller than the drive
rating.
If TorqProve™ is active, the current in one or more phases has been
lost or remains below a threshold for five msecs. The phases are
checked at start to be sure that torque is delivered to the load. If the
drive is faulting on start, increase P44 [Flux Up Time].
If TorqProve is active, and the brake is slipping, this fault occurs. When
TorqProve is used, before the signal to the brake is applied to release
it, the flux up time is used to check the three phases. The angle is
adjusted to be sure that current is flowing through all three phases. If
the motor moves during this test, the brake is not holding and a phase
loss can occur.
If TorqProve is active, and no brake is present, this fault occurs.
Check for an open output contactor.
24 Decel Inhibit Configurable 409
[Dec Inhibit Actn] The drive is not following a commanded deceleration because it is
attempting to limit the bus voltage.
For high inertia loads, set P621 [Slip RPM at FLA] to 0 (V/Hz and SVC
modes only).
25 OverSpeed Limit Resettable Fault Coast Y The motor operating speed exceeds the limit set by the maximum
speed setting P524 [Overspeed Limit]. For forward motor rotation,
this limit is P520 [Max Fwd Speed] + P524 [Overspeed Limit]. For
reverse motor rotation, this limit is P521 [Max Rev Speed] - P524
[Overspeed Limit]. When flux vector control modes are selected in P35
[Motor Ctrl Mode], P131 [Active Vel Fdbk] determines the motor
operating speed. For all other non-flux vector control modes, P1
[Output Frequency] determines the motor operating speed.
Event
No.
Fault/Alarm Text Type Fault
Action
Configuration
Parameter
Auto
Reset
Description/Action(s)
ATTENTION : If a PM motor is used and motor
phase is lost, lower P445 [OutPhaseLossLvl]
to 0 if TorqProve is not used or the drive
output (motor) contacts are not used.
Otherwise, lower P445 [OutPhaseLossLvl]
until the drive is able to start and run without
faulting.

 Loading...
Loading...



