Multi-Axis Coordinated Motion Instructions
412 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
Error Code EX_ERROR Code Description
151 4 Joint Angle Beyond Limits
This indicates the error condition when the Joint 4 in a 5 axis Delta goes beyond
turns counter range limit (45899.99
J4 -45900).
Ext Error 4 : Joint J4 Beyond Limit
151 5 Joint Angle Beyond Limits
This indicates error condition when the Joint 5 in a 5 axis Delta goes beyond
+/-179, +179
J5 -179
Ext Error 5: Joint J5 Beyond Limit
151 6 Joint Angle Beyond Limits
This indicates the error condition when the Joint 6 in a 4 axis Delta goes beyond
turns counter range limit (45899.99 J6 -45900)
Ext Error 6 : Joint J6 Beyond Limit
153 1 Invalid Translation Position
MOP Invalid X Translation
Translation on X axis is Invalid
153 2 Invalid Translation Position
MOP Invalid Y Translation
Translation on Y axis is Invalid
153 3 Invalid Translation Position
MOP Invalid Z Translation
Translation on Z axis is Invalid
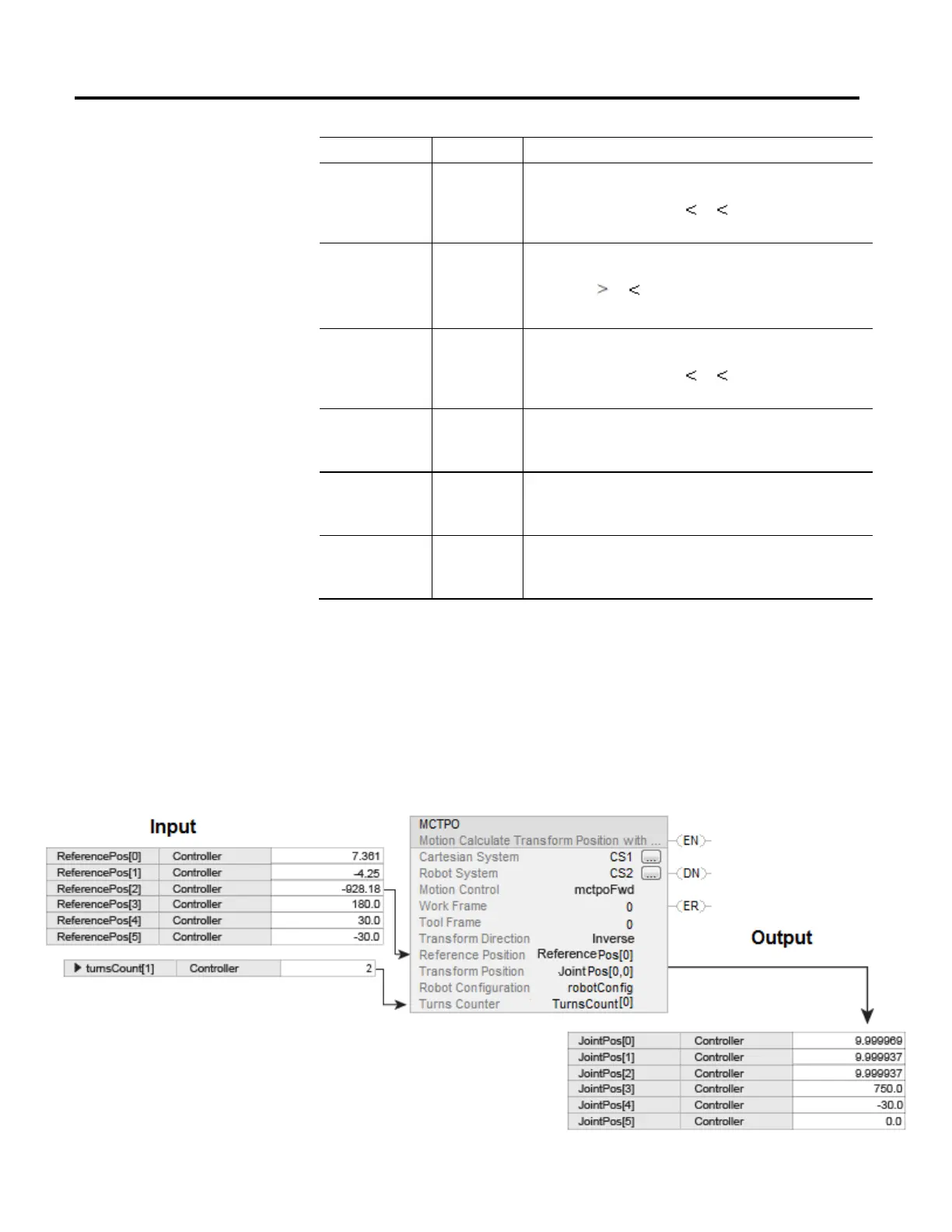
Example
Ladder Diagram
This example illustrates an MCTPO instruction with Transform Direction as
Inverse, where the user feeds Cartesian positions and turns counter as input. The
instruction computes the corresponding target joint angle positions and is
written to the Transform Position parameter as the output.
 Loading...
Loading...







