Multi-Axis Coordinated Motion Instructions
478 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
MOTION_INSTRUCTION Data Type
To see if Check if this
bit is on
Data Type Notes
The rung is true EN BOOL Sometimes the EN bit stays on even if the rung goes false. This happens
if the rung goes false before the instruction is done or an error has
occurred.
The instruction is
done.
DN BOOL The transform keeps running after the instruction is done.
An error happened ER BOOL Identify the error number listed in the error code field of the Motion
control tag then, refer to Motion Error Codes.
The transform process
is running.
IP BOOL Any of these actions cancels the transform and turns off the IP bit:
Applicable stop instruction
Shutdown instruction
Fault action
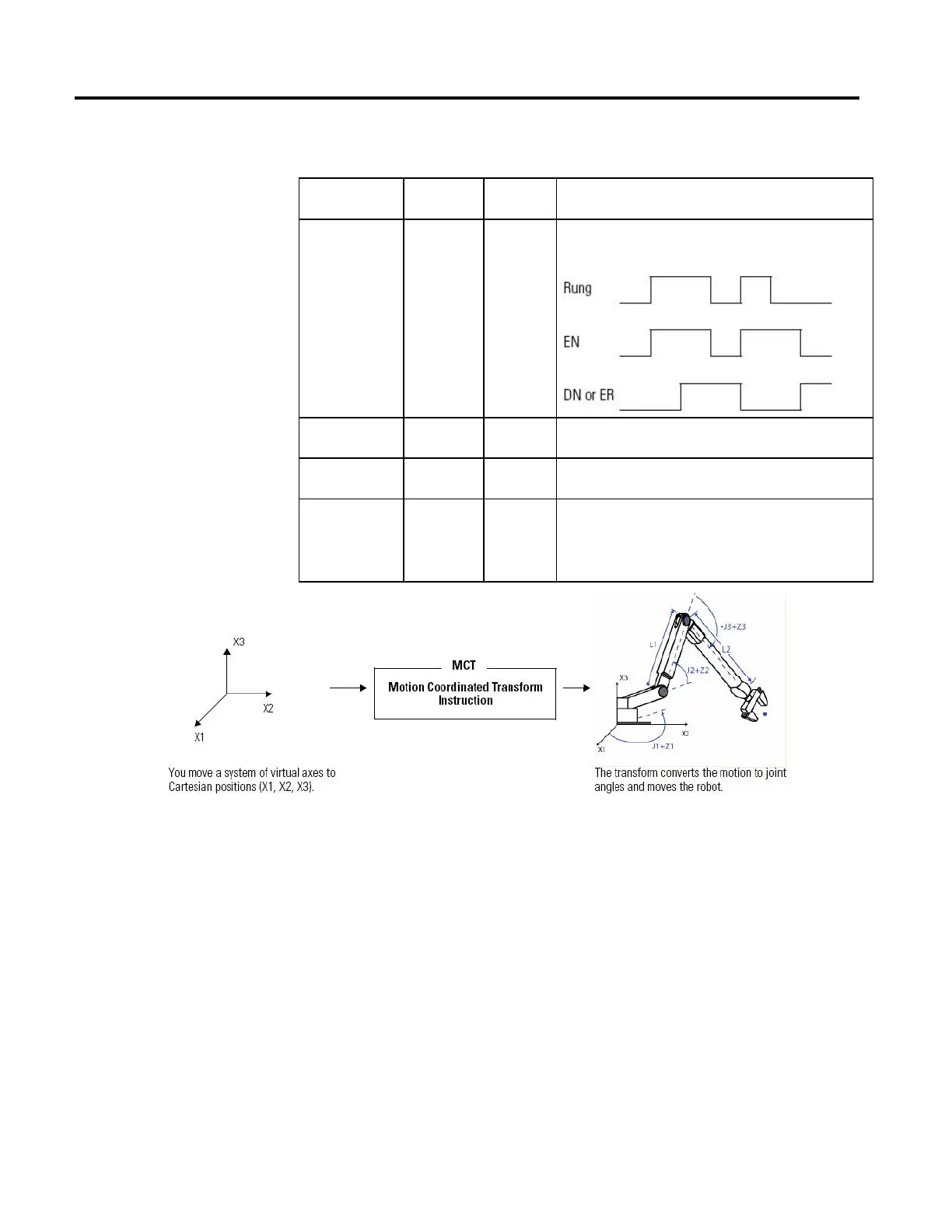
The transform controls up to three joints of the robot: J1, J2, and J3.
Data Flow of MCT Instruction between Two Coordinate Systems
The following illustrations show the flow of data when an MCT Instruction is
active. CS1 is a Cartesian coordinate system containing X1, X2 and X3 axes as the
source of the MCT instruction. CS2 is the joint coordinate system containing J1,
J2, and J3 axes as the target of the MCT instruction.
All axes units are in Coordinate Units
Follow these guidelines to use an MCTP instruction.
 Loading...
Loading...







