Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 507
controller to optimize the velocity profile, reduce the CPU load, and guarantee a
symmetric profile.
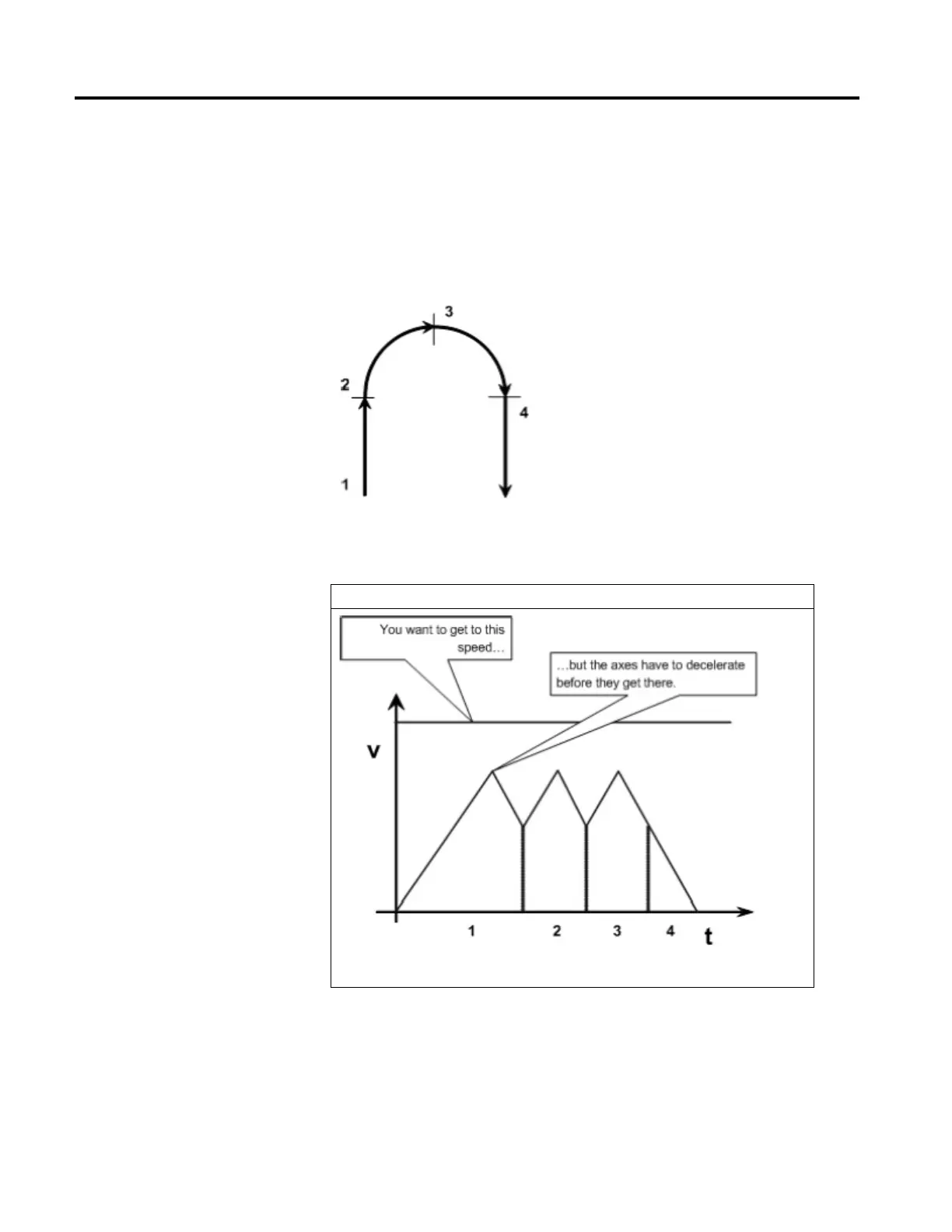
How To Get a Triangular Velocity Profile
If you want to program a pick and place action in four moves, minimize the Jerk
rate, and use a triangular velocity profile.
Then, use termination type 5. The other termination types may not let you get to
the speed you want.
Termination Types 2, 3, 4, or 6
The length of each move determines its maximum speed. As a result, the axes will not reach a speed that
causes them to overshoot the target position during deceleration.
 Loading...
Loading...







