Motion State Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 57
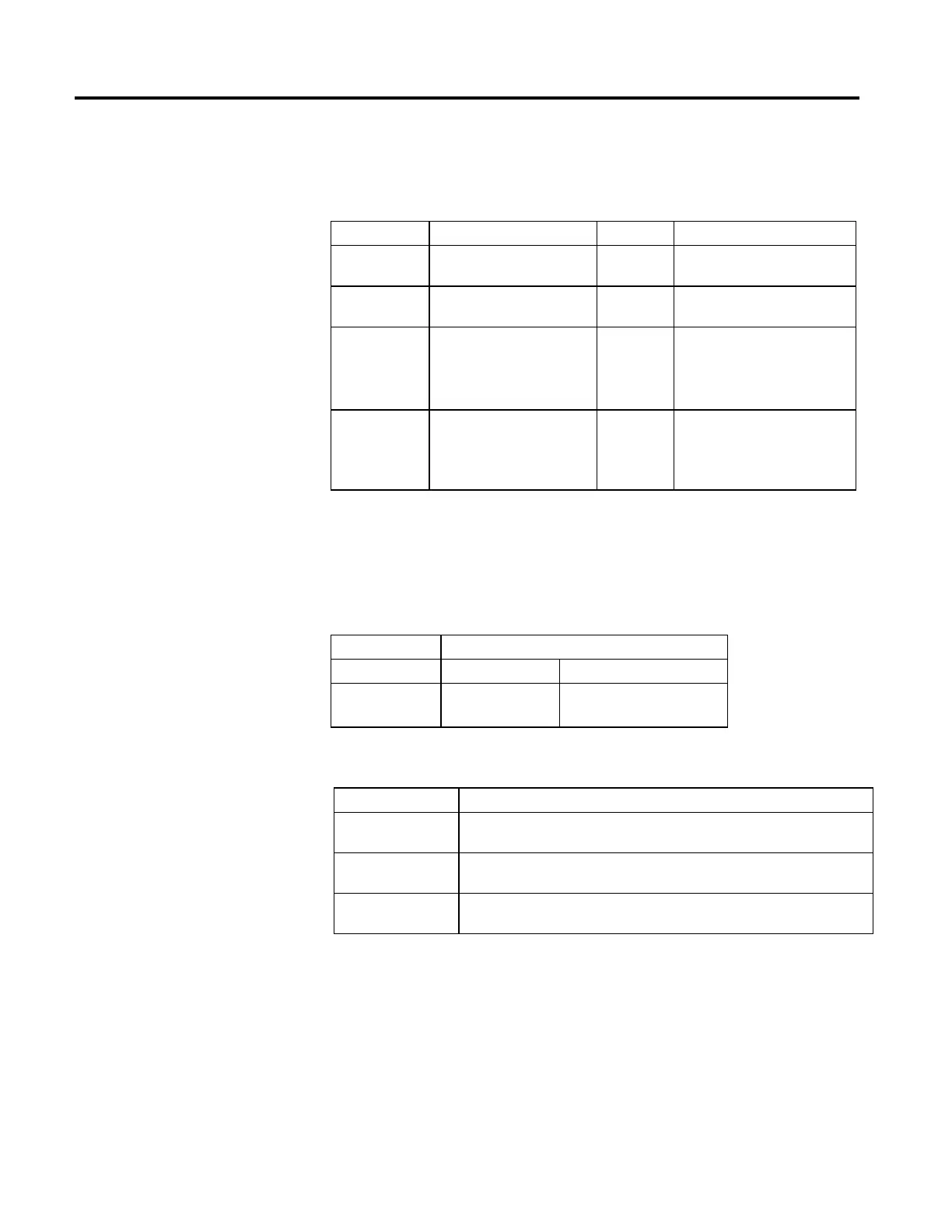
Operands
Ladder Diagram and Structured Text
Operand Type Format Description
Axis AXIS_SERVO Tag Motion Axis of data type AXIS_SERVO
only.
Motion Control MOTION_INSTRUCTION Tag Structure used to access instruction
status parameters.
Drive Output SINT
INT
DINT
REAL
Immediate
or Tag
Voltage to output in % of servo Output
Limit or in Volts.
Drive Units Boolean Immediate How do you want to interpret the drive
output?
0 = Volts
1 = Percent
See Structured Text Syntax for more information on the syntax of expressions
within structured text.
Enter your selection for the operands that require you to select from available
options:
This Operand Has These Options Which You...
Enter As Text Or Enter As a Number
DriveUnits Volts
Percent
0
1
MOTION_INSTRUCTION Structure
Mnemonic Description
.EN (Enable) Bit 31 It is set when the rung makes a false-to-true transition and remains set until the servo
message transaction is completed and the rung goes false.
.DN (Done) Bit 29 It is set when the axis’ drive enable bit is activated and the specified analog output is
successfully applied.
.ER (Done) Bit 28 It is set to indicate that the instruction detected an error, such as if you entered a Drive Output
value that was too large.
 Loading...
Loading...







