34
Input request
Position %
0% 100%
4mA
Input request
Position %
0% 100%
4mA
20mA
Polarity:4mA=CL
Polarity:4mA=OP
BIFFI FAIL SAFE ELECTRIC ACTUATORS, MODEL EFS2000V4
InstructIon and operatIng Manual
13.1.7 Positioner
The positioning function is only available in
modulating EFS2000v4 actuators and allows
to position the valve according to a ‘position
request R%’ command signal. The positioning
function compares the present actuator
position % with the position request R%,
and if the difference is greater than the dead
band the actuator is driven to reach the new
requested position. The ‘position request R%’
signal may either be received from the bus or
the 4-20 mA analog input. If the ICON2000 is
set to receive the position request R% from the
BUS, a fieldbus interface card must be present,
or a hardware alarm will be generated. If the
ICON2000 is set to receive the position request
R% from the 4-20 mA generator, the Ain/Aout
card must be present, or a hardware alarm
will be generated. The following options can be
configured via local operator interface:
• Dead band: configurable from ‘position
resolution%’ to 25.5% of the maximum
position error. The configured value should be
large enough to avoid the hunting effect.
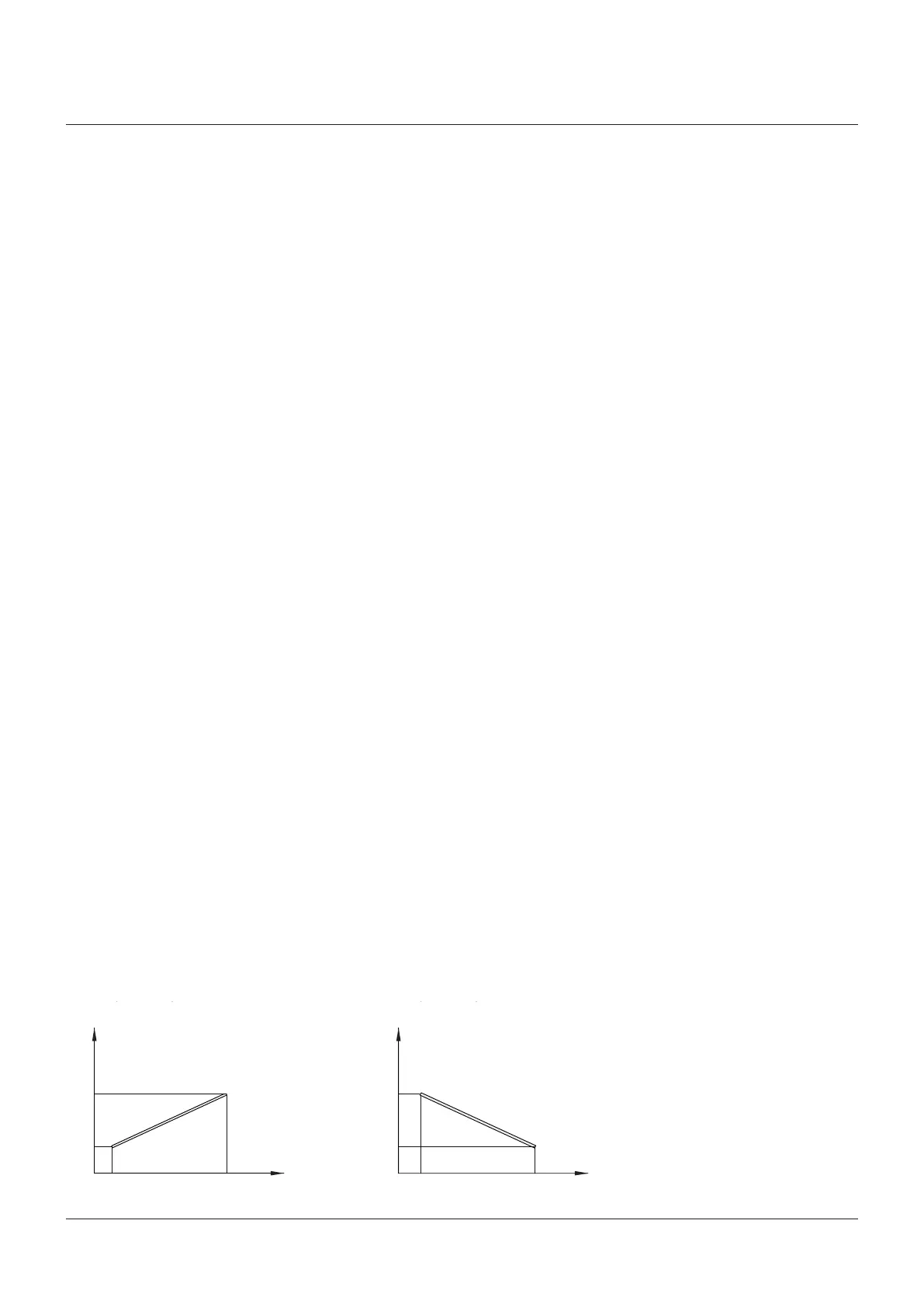
• Polarity of the 4-20 mA position request
signal: it allows to reverse the relationship
between the 4-20 mA input signal and
the ‘position request R%’, according to
the following diagrams. This option is not
available when the ICON2000 is set to receive
the ‘position request R%’ from the bus.
• Motion inhibit time: it allows to adjust the
length of the delay time between two cycles
of the motor. It can be configured from 1 to
255 secs and allows setting the maximum
number of start/hour of the electrical motor.
• % MIN and % MAX, 4-20 mA input signal
range: it allows to change the relationship
between the input signal and the position
request R%. This function is useful when
a single 4-20 mA signal is used to control
the position of 2 valves (e.g.: split range
applications). The option is not available when
the ICON2000 is set to receive the ‘position
request R%’ from the bus.
Input 4-20 mA
Polarity:4 mA=CL
Input 4-20 mA
Polarity:4 mA=OP
Input request Input request
Position % Position %
The following examples will clarify the above
option:
example a): with input signal = 4mA, the
position request is 0% and the
actuator is driven to close.
With input signal = 20mA, the
position request is 100% and the
actuator is driven to open. With
input signal = 12mA the position
request is 50% and the actuator
is driven to reach position 50%.
example b): with input signal < 8mA, the
position request is 0% and the
actuator is driven to close.
With input signal = 16mA, the
position request is 100% and the
actuator is driven to open. With
input signal = 12mA the position
request is 50% and the actuator
is driven to reach position 50%.
example c): with input signal = 4mA , the
position request is 100% and
the actuator is driven to open.
With input signal = 20mA, the
position request is 0% and the
actuator is driven to close. With
input signal = 12mA the position
request is 50% and the actuator
is driven to reach position 50%.
example d): with input signal < 8mA, the
position request is 100% and
the actuator is driven to open.
With input signal = 16mA , the
position request is 0% and the
actuator is driven to close. With
input signal = 12mA the position
request is 50% and the actuator
is driven to reach position 50%.