3
1 Introduction
Brigade’s Backsense
®
uses FMCW (Frequency Modulated Continuous Wave) radar system
technology and is designed to detect people and objects in blind spots, significantly reducing
collisions. They detect stationary and moving objects, providing the driver with in-cab visual
and audible warnings – alerting the operator whose attention cannot be focused on all risk
areas. Backsense
®
works effectively in harsh environments and in poor visibility including
darkness, smoke, fog and dust.
It is imperative that Brigade Backsense
®
is fitted and commissioned by competent and trained
technicians. The installer is responsible for the fitness for purpose of the overall system and
must adhere to relevant regulations and legislation. Operators of the vehicle to which the
Brigade Backsense
®
System is fitted must be made fully aware of how to interpret the system
so they will not be distracted by or rely completely on it. Distraction can cause collisions.
The system is intended as an aid only. The operator must still concentrate on operating the
vehicle, obeying traffic and local regulations and continuing to use his/her own training, senses
and other vehicle aids, such as mirrors, as if the system were not in place. Nothing removes
the responsibility of the operator to operate the vehicle in a proper and lawful manner.
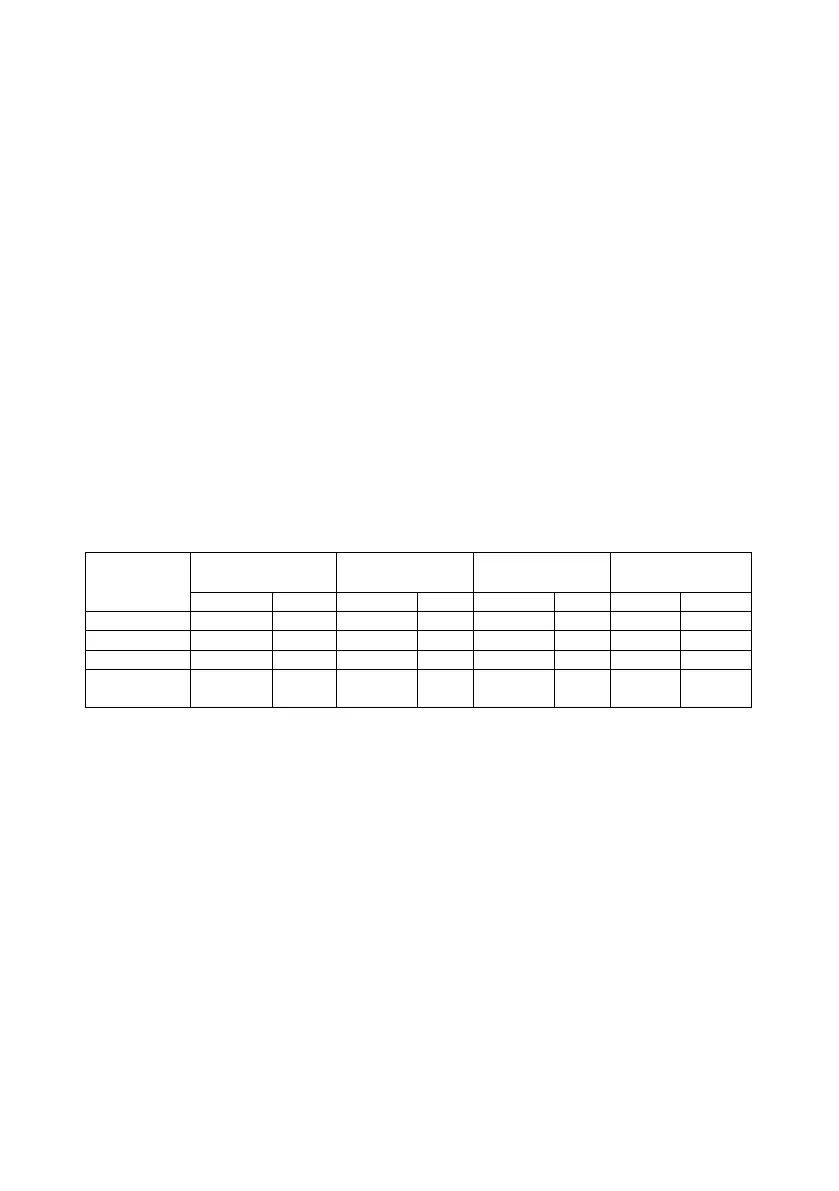
1.1 Detection Ranges
There are four available Backsense
®
systems available:
Length of each
Detection Zone
* Default setting
BS-7030, 7045 & 7060 each has a fixed detection length and width. The length is divided into
five equal detection zones. The buzzer and trigger output activate in all zones on detection.
BS-8000 uses the same fundamental operation as all the above systems but the settings are
fully configurable: Detection length, detection width, zones length, blind length, blind width,
blind zones, trigger output length and buzzer starting zone. Refer to section “4 Configurable
System Model BS-8000”.
1.2 Object Detection Capability
Warning
There is no detection of objects or part of an object closer than approx. 0.3m to
the sensor.
Object detection between approx. 0.3m to 1.3m from the sensor requires a
minimum relative speed of around 2km/h between the object and sensor. Same for re-
detection of objects after a stationary condition.