39
Start-up
Type 3280, 3285
X.CONTROL
Parameterization of the position controller, insensitivity range (dead band) of the position controller
Input of the dead band in %, with regard to the scaled stroke/rotation angle range. This function ensures that the
controller is only activated once a certain control difference has been achieved.
X.TIME
Limiting the control speed
Smaller control speeds can be entered in order to limit the control speed. Following settings via the Bürkert-
ommunicator are possible:
Mode Max. control speed [sec.]
Slow 1 2.8
Slow 2 3.2
Normal 2.5
Faster 2.2
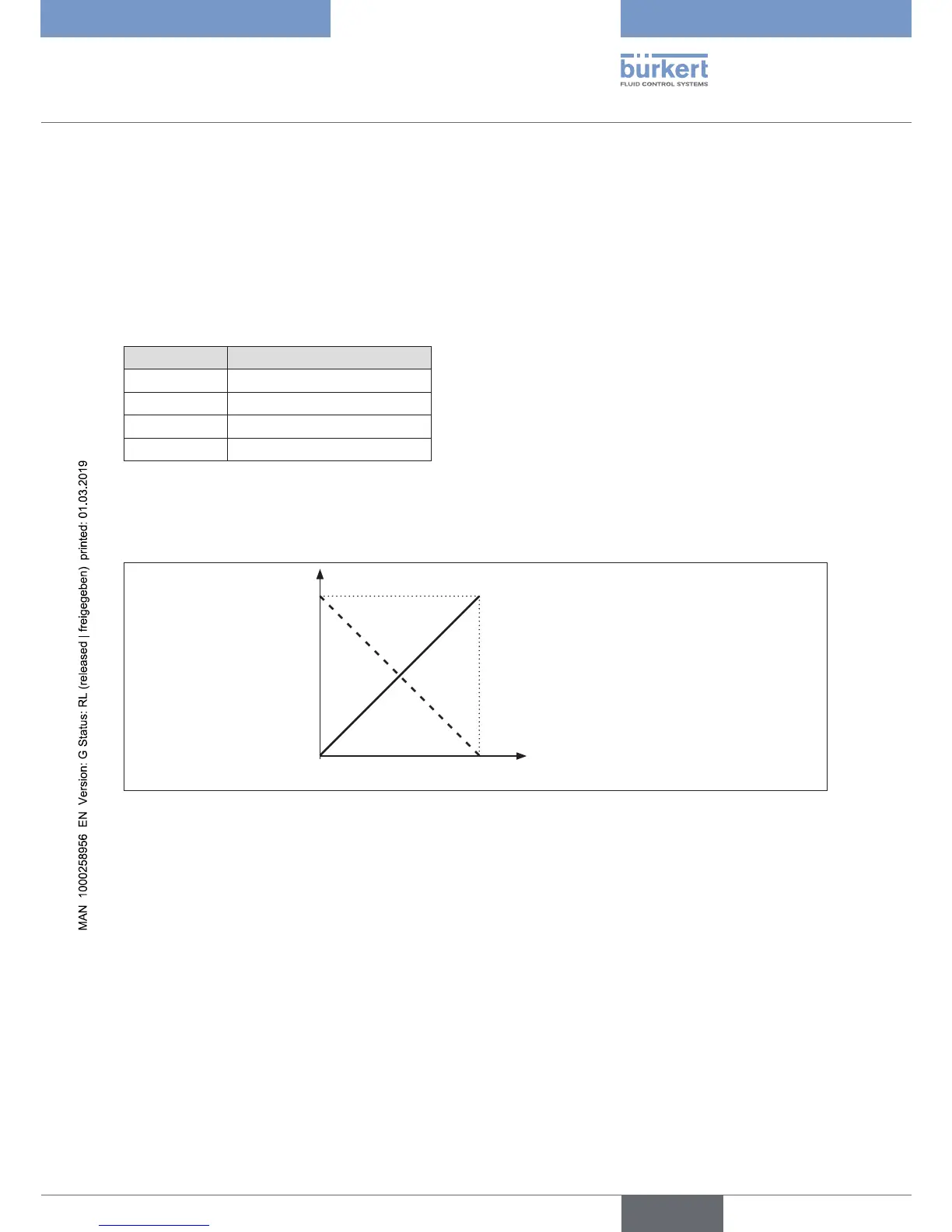
DIR.CMD
Effective sense or effective direction of the position controller set-point value
Use this auxiliary function to set the sense of effective direction between the input signal (INPUT) and the nominal
position (CMD) of the actuator.
Set-point position (CMD)
Fall
Rise
Standard signal
0 mA, 4 mA,
0 V
20 mA,
5 V, 10 V
100 %
0 %
Valve open
Valve close
Figure 22: Graph of effective direction
F.LIMIT
Energy-saving function
The motor valve features a set table energy-saving function. When the energy-saving function is switched on, less
current is supplied to the motor. The motor then provides a smaller torque, resulting in a reduced max. permissible
medium pressure. Only use the energy-saving function with very low differential pressures from On-Closed output
(max. medium pressure 3 bar, max. differential pressure 1 bar).
SAFEPOS when büS/CANopen
Entry of the safety position
You can input how the actuator is to behave if communications fail. It is possible to move the actuator into any
position or to pause it in the current position.