43
Start-up
Type 3280, 3285
• Amplification factor of the process controller.
The amplification factor determines the P-component of the PID controller.
• Reset time of the process controller.
The reset time determines the I-component of the PID controller.
• Derivative time of the process controller.
The derivative time determines the D-component of the PID controller.
• Filtering of the process actual value input.
The filter of the input signal has a low-pass performance and can be adjusted in several stages.
Setting of the filter effect
Setting Corresponds to cut-off frequency (Hz) Effect
0 10 Lowest filter effect
1 5
2 2
3 1
4 0.5
5 0.2
6 0.1
7 0.07
8 0.05
9 0.03 Largest filter effect
P.SIM
Simulation of the process
This function can be used to simulate the process. The following parameters can be set:
SIM.Gain
Specify amplification factor
SIM.Delay
Specify time constant in seconds
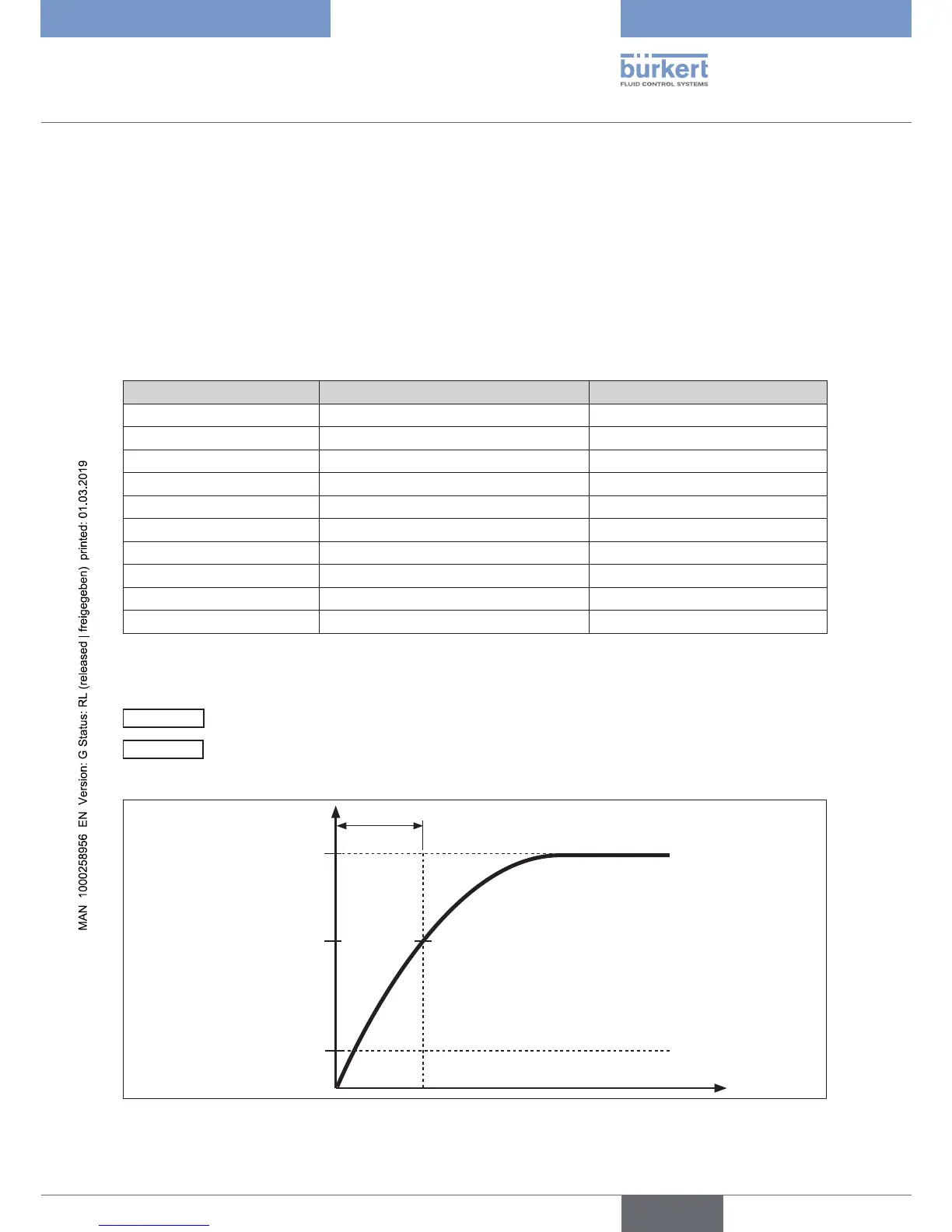
Example of a simulated process:
63 %
1
SIM.Gain
(Amplification factor [Kp])
t
SIM.Delay (Time constant [T] in s)
Output of the simulated
process
Input of the simulated
process
y
u
5
Figure 26: Example of a simulated process. Performance of the PT1 element