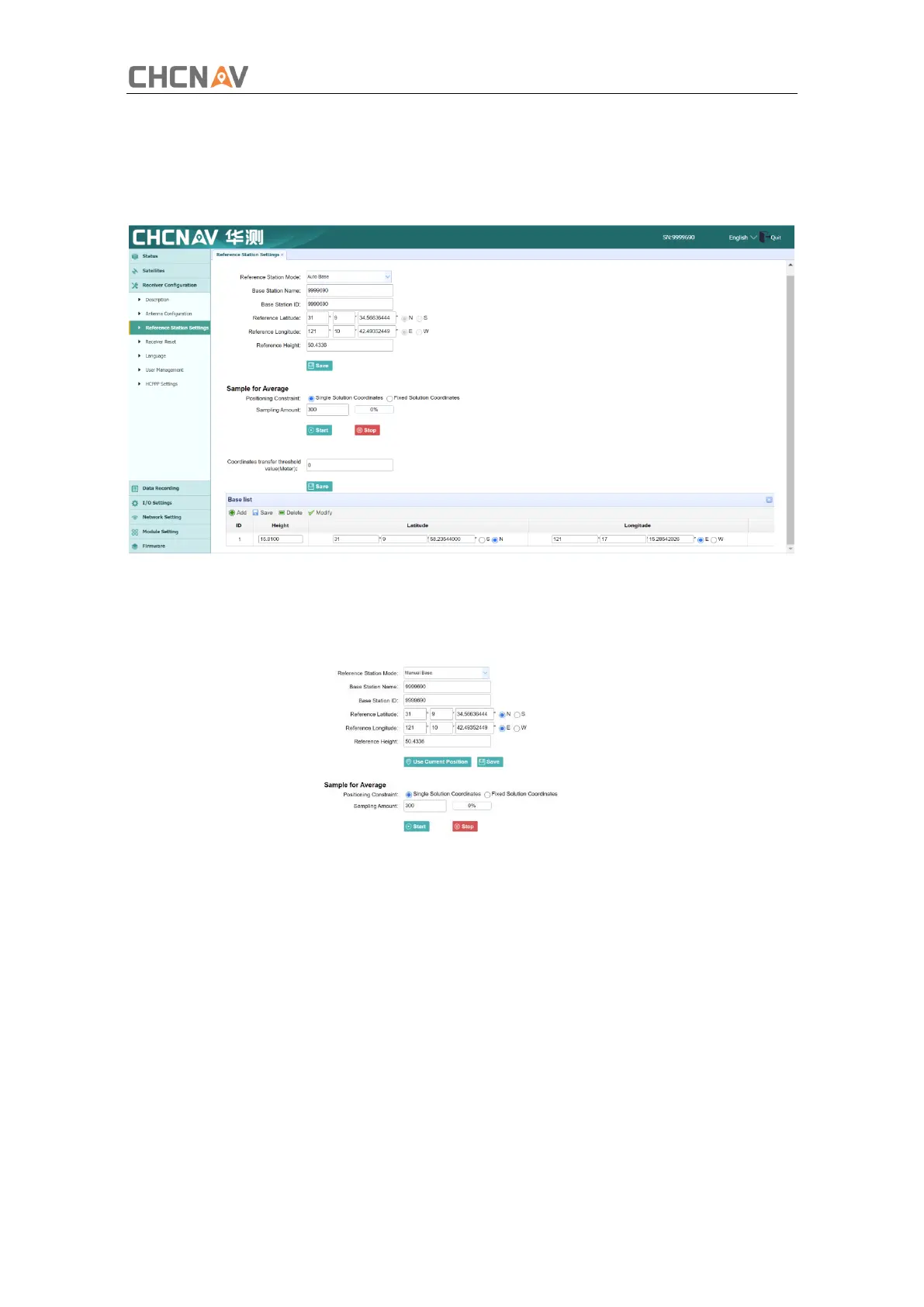
2.Auto Base: The receiver will serve as a base after this mode is enabled, and then
broadcast correction data based on coordinate inputted by user or obtained through
autonomous positioning automatically.
3.Manual Base: The receiver will serve neither as a base nor a rover after this mode is
enabled. Users need to configure the receiver manually.
For Reference Latitude and Reference Longitude:
There are mainly three methods to enter the reference coordinates and shown as follows:
1.Acquire Current Position: Click this button to acquire current position obtained through
autonomous positioning automatically.
2.Manual Input: Manually input the coordinate of a control point.
3.From CORS: After the receiver logging in CORS, the software can record the coordinate
of current position based on fix solution.
For Sample for Average:
Users can determine the positioning limit and sampling amount. The positioning limit falls
into two types: