Return to TOC Curtis 1239E-1269E Manual, os 37.0 RevA – May 2021
10 — VEHICLE CONTROL LANGUAGE (VCL)
pg. 113
Aer the “Brake Type = 5” switch, the brake signal passes through a limiter which limits the brake
signal to a range of 0–100% (0–32767). Aer the limiter the brake signal is a VCL variable called
Mapped_Brake, which is displayed as Mapped Brake in the Monitor » Inputs menu. Checking the
value of Mapped_Brake using the 1313 is a good way to see if the Brake Menu parameters are set
correctly. A VCL program can control the brake by changing the variable VCL_Brake (only if Brake
Type = 5).
The brake signal then goes through a selector which will change it to 100% if the fault-action
FullBrake is active. (see Troubleshooting Chart).
e brake signal then goes through a third selector switch that will set the brake signal = 0% if the
Brake Pedal Enable parameter is set O. If set On, then the brake signal will pass through to the
Control Mode Processing block. e brake signal aer this third selector switch is the VCL variable
called Brake_Command and Brake Command in the Monitor » Inputs menu.
Brake_Command is the nal value of the brake signal chain that is input to the Control Mode
Processing block; see Figure 19. Checking the value of Brake_Command using the 1313 is a good
way to see the nal brake signal. Note: If Brake_Command is non-zero in Speed Mode Express or
Speed Mode, the rottle_Command will be set to 0% (see Fig. 19).
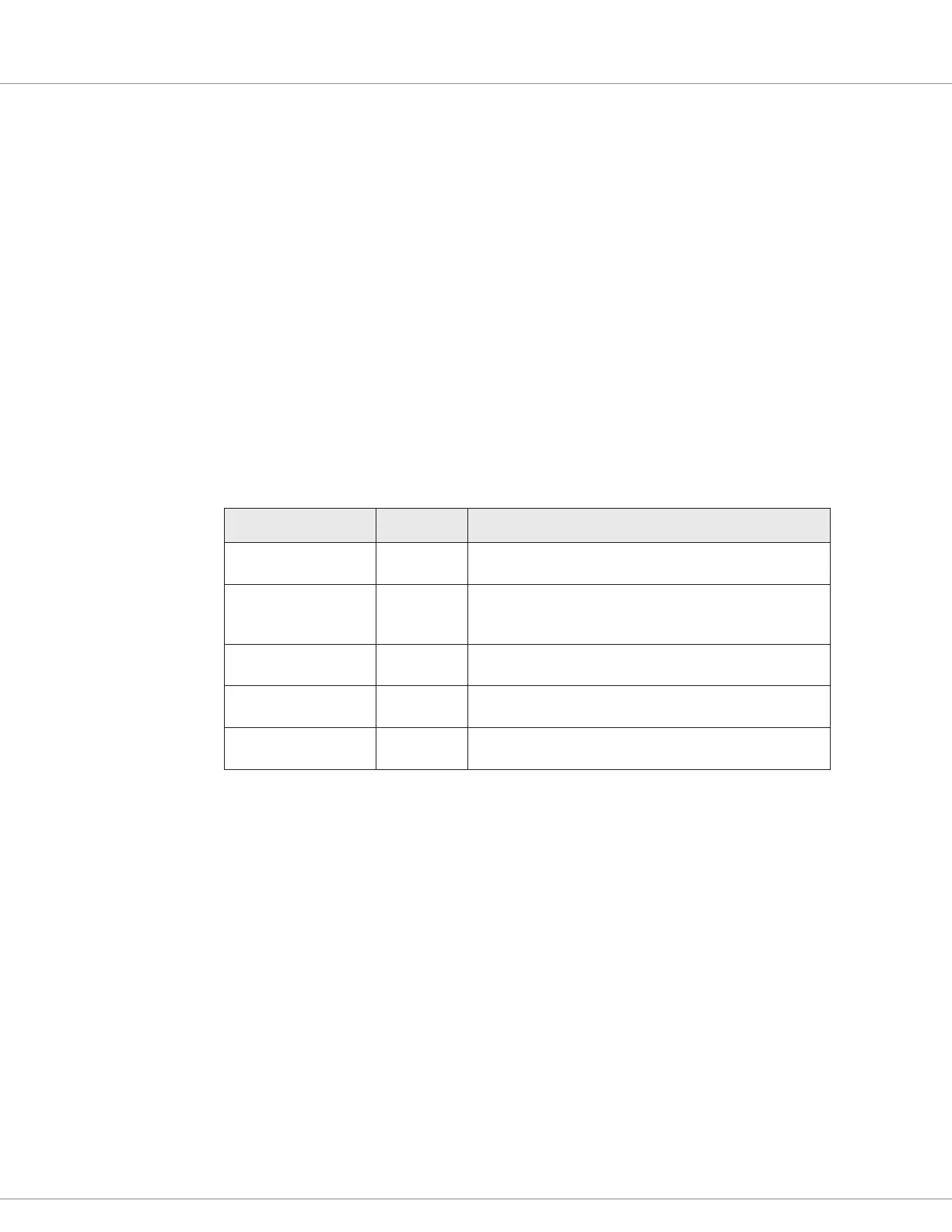
e following brake processing variables are accessible by VCL:
VCL Variable
CAN Object Index
Access Description
Pot2_Raw
0x3217 0x00
Read Only Voltage measurement at pin 17.
OS_Brake
0x3519 0x00
Read Only
Brake pot value after mapping, to be used in VCL when VCL
Brake Enable = On and Brake Type = 1–3.
Scale: 0 – 100%, 0 – 32767
VCL_Brake
0x3219 0x00
Read/Write VCL-accessible brake command.
Mapped_Brake
0x3212 0x00
Read Only Brake pot value after mapping.
Brake_Command
0x321A 0x00
Read Only Command resulting from brake processing.
Control Mode and Motor Control Processing
Figure 19 begins with the rottle_Command and Brake_Command inputs and routes the signals
according to the selected control mode. For the speed modes, a switch will zero the Throttle_
Command if the Brake_Command is any value but 0%. e signal chains are then directed to Speed
Mode Express, Speed Mode, or Torque Mode based on Control Mode Select. Note that in Torque
Mode there is no emergency reverse. (Note: emergency reverse is not applicable to the 1239E/1269E
controller’s on-road applications).
e control mode function uses algorithms to convert the incoming throttle and brake signals, the
motor rpm, and associated parameter settings into a Controller Torque Command.
Based upon the control mode selected, the desired Controller Torque Command is calculated, which
is passed to the Motor Control block (see Figure 18). e Motor Control block uses its mathematical
model of the specic motor & technology to generate the high eciency three-phase outputs that
drive the AC motor via the cables connected to the U, V, and W terminals. For AC Induction motors,
504 motor characterizations are available using the Motor Type parameter, or a motor can be user
characterized (Motor Type 0) following the procedures in Chapter 8A.
Quick Links:
Figure 18 p.112
Figure 19 p.114
Motor Type p.60
Automated Characterization
AC Induction motors p.93
Quick Links:
Brake Menu
Brake parameters p.51
Current Limits Menu
Brake Current Limit p.46
Brake Taper Speed p.44
Monitor Inputs
Brake Command p.77
Pot2_Raw p.77
Figure 18 p.112
Figure 19 p.114