Chapter 8 ParametersASDA-A2R Series
8-54 Revision December, 2014
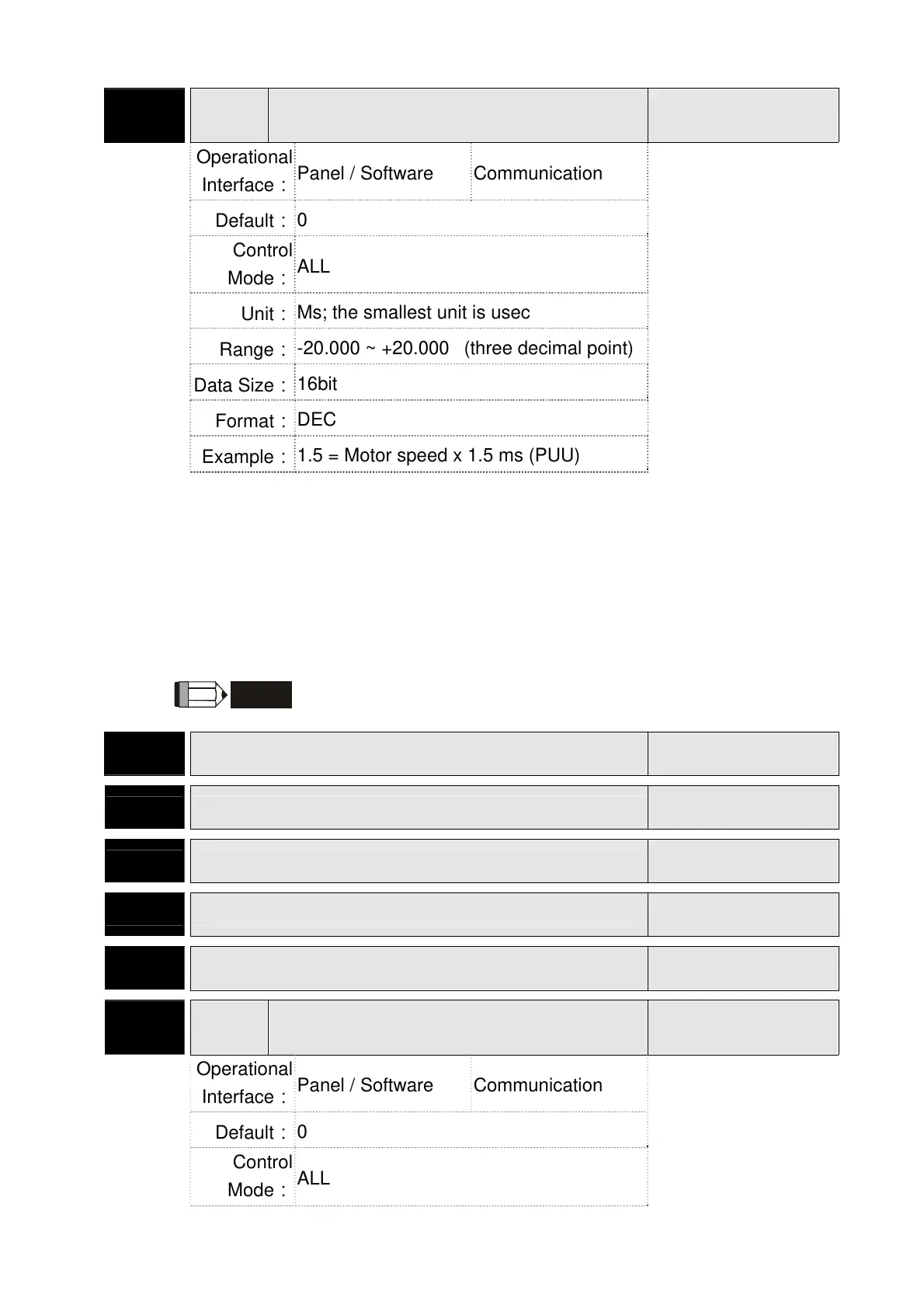
P1-17 TEET
Compensation of Following Error-
Additional Time Setting
Address: 0122H
0123H
Operational
Interface:
Panel / Software Communication
Related Section:
Default:
0
Control
Mode:
ALL
Unit:
Ms; the smallest unit is usec
Range:
-20.000 ~ +20.000 (three decimal point)
Data Size:
16bit
Format:
DEC
Example:
1.5 = Motor speed x 1.5 ms (PUU)
Settings:
When this function is enabled (P1-36 = 1), the system will make
the position error (PUU) close to 0 according to the compensation
amount of command. If the time delay is caused by other reasons,
users could setup the additional compensation time to
compensate the position error.
Additional compensation distance = P1-17 x Motor speed
NOTE
1) Value of P1-36 has to set to 1.
P1-18 Reserved
Address: 0124H
0125H
P1-19 Reserved
Address: 0126H
0127H
P1-20 Reserved
Address: 0128H
0129H
P1-21 Reserved
Address: 012AH
012BH
P1-22 Reserved
Address: 012CH
012DH
P1-23 CMOF
COMPARE-Offset Data of CMP
(non-volatile)
Address: 012EH
012FH
Operational
Interface:
Panel / Software Communication
Related Section:
Default:
0
Control
Mode:
ALL
 Loading...
Loading...
