Chapter 12 Descriptions of Parameter SettingsC2000 Plus
12.1-11-63
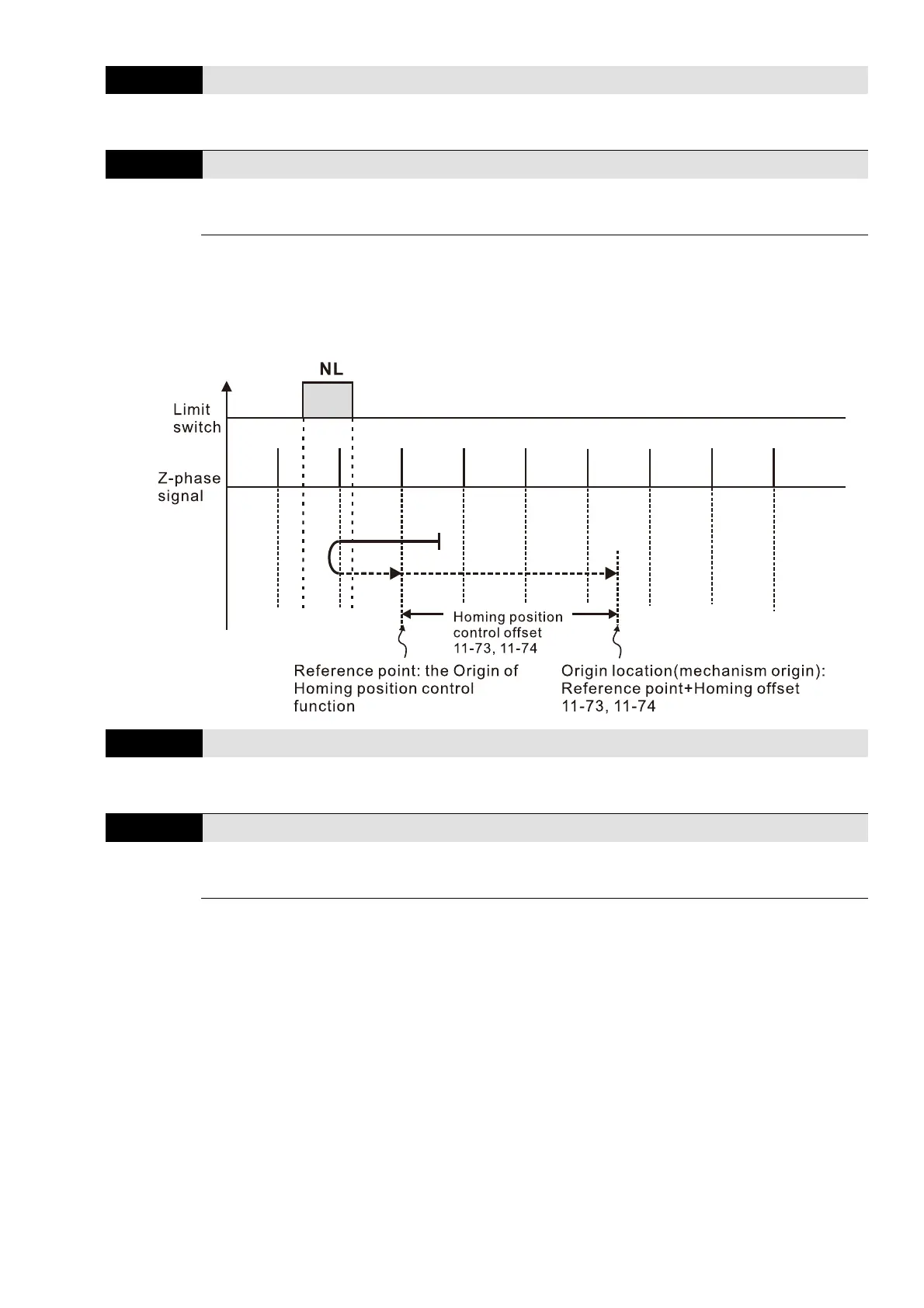
11-73
Homing Control Offset (Revolution)
Default: 0
Settings -30000–30000 resolutions
11-74
Homing Control Offset (Pulse)
Default: 0
Settings Refer to Pr.10-01 setting
Pr.11-73 and Pr.11-74 are the offset number of revolutions and pulses required for the coordinate
system origin (mechanical origin) position determined after the homing positioning process is
completed.
When Pr.10-00 = 8, the setting range for Pr.11-73 is -16383–16383.
11-75
Position Record (Revolution)
Default: 0
Settings -30000–30000 resolutions
11-76
Position Record (Pulse)
Default: 0
Settings Refer to Pr.10-01 setting
The position memory function enables the drive to record the motor’s current position and makes
the coordinate system remain at the mechanical origin even after the drive’s power-off when
using incremental encoder. With this function, you do not need to execute the homing positioning
again.
The position memory function is only valid when Pr.11-60 bit0 = 1 (position memory function is
enabled).
When the drive is powered off, it records the motor’s current position in Pr.11-75 and Pr.11-76.
After the drive is powered ON again, the motor’s initial position = Pr.11-75 × PPR number + Pr.11-
76, and the homing process is regarded as completed.
If the saved position exceeds the maximum capacity of position memory (Pr.11-75 and Pr.11-76),
the warning code POF (position counting overflow) is displayed after the drive is powered ON
again.