Chapter 12 Description of Parameter SettingsC2000 Plus
12.2-36
No-load / light-load operation adjustment
8. Start the motor with no-load
(a) Set Pr.11-00 = 1 Auto-tuning for ASR and APR
(b) Start the motor without load, and operates the motor to 1/2 of rated rotor speed
a. If the start direction is wrong, starting rotation is not smooth (ocA) or the motor salient ratio
(Lq / Ld) is low, increase Pr. 10-52 (injection magnitude) and Pr. 10-42 (initial angel detection
pulse value) to improve the accuracy of the angle detection.
b. If Pr. 10-51 (injection frequency) is close to the rated motor frequency (Pr. 01-01), then
increase Pr.10-51 to avoid the angle detection difference caused by motor rated frequency.
9. Acceleration test with no load / light load
A1. Accelerate to rated frequency and observe if the motor operates stably.
a. If the motor output rotor speed presents periodic low-frequency wave, increase Pr. 11-04
(ASR2 high-speed bandwidth), or increase Pr. 10-32 (PM FOC sensorless speed
estimator bandwidth).
b. If the output frequency reflects high-frequency vibration, decrease Pr.11-04 or decrease
Pr.10-32.
A2. Accelerate the motor to the maximum frequency, and observe if it operates stably.
If the motor stalls when accelerating to the maximum rotor speed, increase Pr.10-32 (PM
FOC sensoress speed estimator bandwidth) and Pr.10-34 (PM sensorless speed
estimator low-pass filter gain).
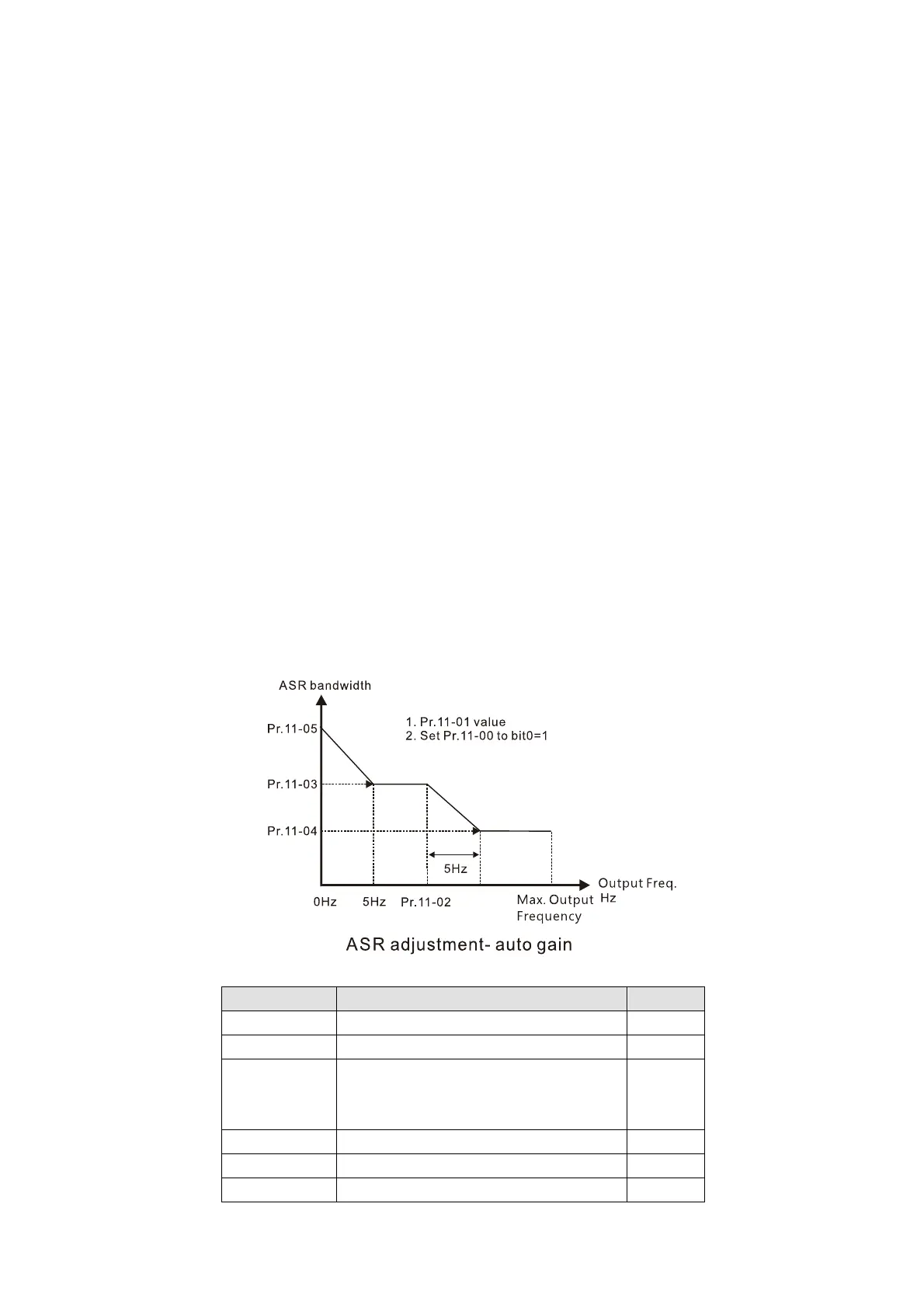
Setting curve for speed regulator (ASR) and related parameters:
Parameter Description Default
Pr.11-00 System control 0
Pr.11-01 Per unit of system inertia 256
Pr.11-02
ASR1 / ASR2 switch frequency
(it is suggested to set the switch
frequency higher than Pr.10-39)
7 Hz
Pr.11-03 ASR1 low-speed bandwidth 10 Hz
Pr.11-04 ASR2 high-speed bandwidth 10 Hz
Pr.11-05 Zero-speed bandwidth 10 Hz