Chapter 16 PLC Function Applications│CP2000
16-37
Special
D
Description of Function Default R/W*
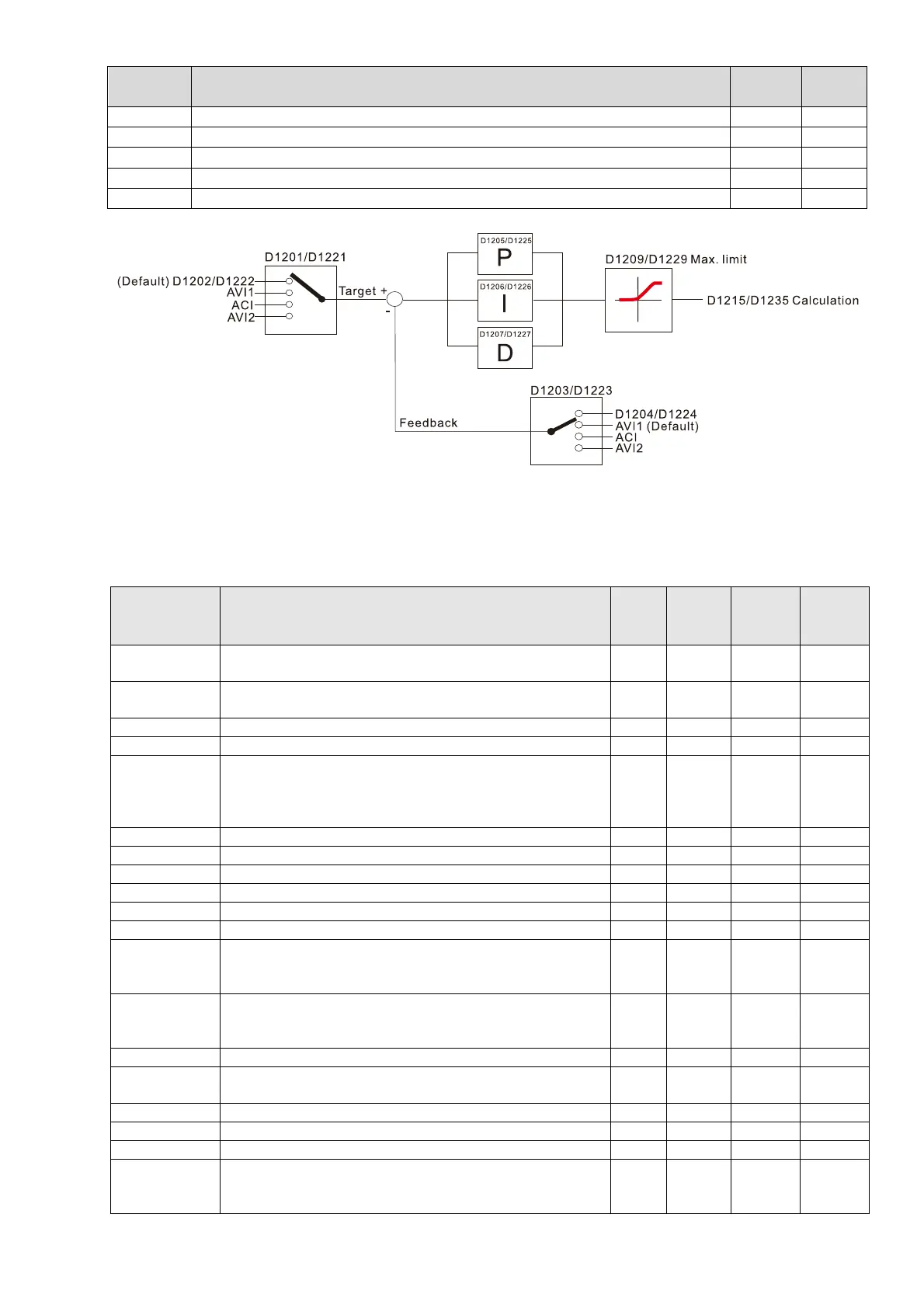
D1225 PID1 P value (decimal point 2) 10 RW
D1226 PID2 I value (decimal point 2) 1000 RW
D1227 PID2 D value (decimal point 2) 0 RW
D1229 Max. limit of PID2 10000 RW
D1235 Counting value of PID2 (decimal point 2) 0 RO
The following is CANopen Master's special D (can be written in only with PLC in Stop state)
※ CP2000 does not have torque and position mode. As CANopen master, however, CP2000 can
issue torque and position commands to CANopen slaves.
n=0–7
Special D Description of Function
PDO
Map
Power
off
Memory
Default: R/W
D1070
Channel opened by CANopen initialization
(bit0=Machine code0 …….)
NO NO 0 R
D1071
Error channel occurring in CANopen initialization
process (bit0=Machine code0 …….)
NO NO 0 R
D1072 Reserved - - -
D1073 CANopen break channel (bit0=Machine code0 …….) NO NO R
D1074
Error code of master error
0: No error
1: Slave station setting error
2: Synchronizing cycle setting error (too small)
NO NO 0 R
D1075 Reserved - - -
D1076 SDO error message (main index value) NO NO R
D1077 SDO error message (secondary index value) NO NO R
D1078 SDO error message (error code) NO NO R
D1079 SDO error message (error code) NO NO R
D1080 Reserved - - -
D1081
|
D1086
Reserved - -
-
D1087
|
D1089
Reserved - - -
D1090 Synchronizing cycle setting NO YES 4 RW
D1091
Sets slave station On or Off (bit0–bit7 correspond to
slave stations number 0–7)
NO YES FFFFH RW
D1092 Delay before start of initialization NO YES 0 RW
D1093 Break time detection NO YES 1000ms RW
D1094 Break number detection NO YES 3 RW
D1095
|
D1096
Reserved - - -
 Loading...
Loading...



