Chapter 16 PLC Function Applications│CP2000
16-137
D2013+n*100). This also illustrates how the master can handle these tasks through read/write
operations in the special D area.
Furthermore, it should be noted that the remote I/O of PDO2 can obtain the slave device's
current DI and AI status, and can also control the slave device's DO and AO status. Nevertheless,
after introducing a fully automatic mapping special D, the CP2000 CANopen master also provides
additional information refreshes. For instance, while in speed mode, acceleration/deceleration
settings may have been refreshed. The special D therefore also stores some seldom-used
real-time information, and these commands can be refreshed using the CANFLS command. The
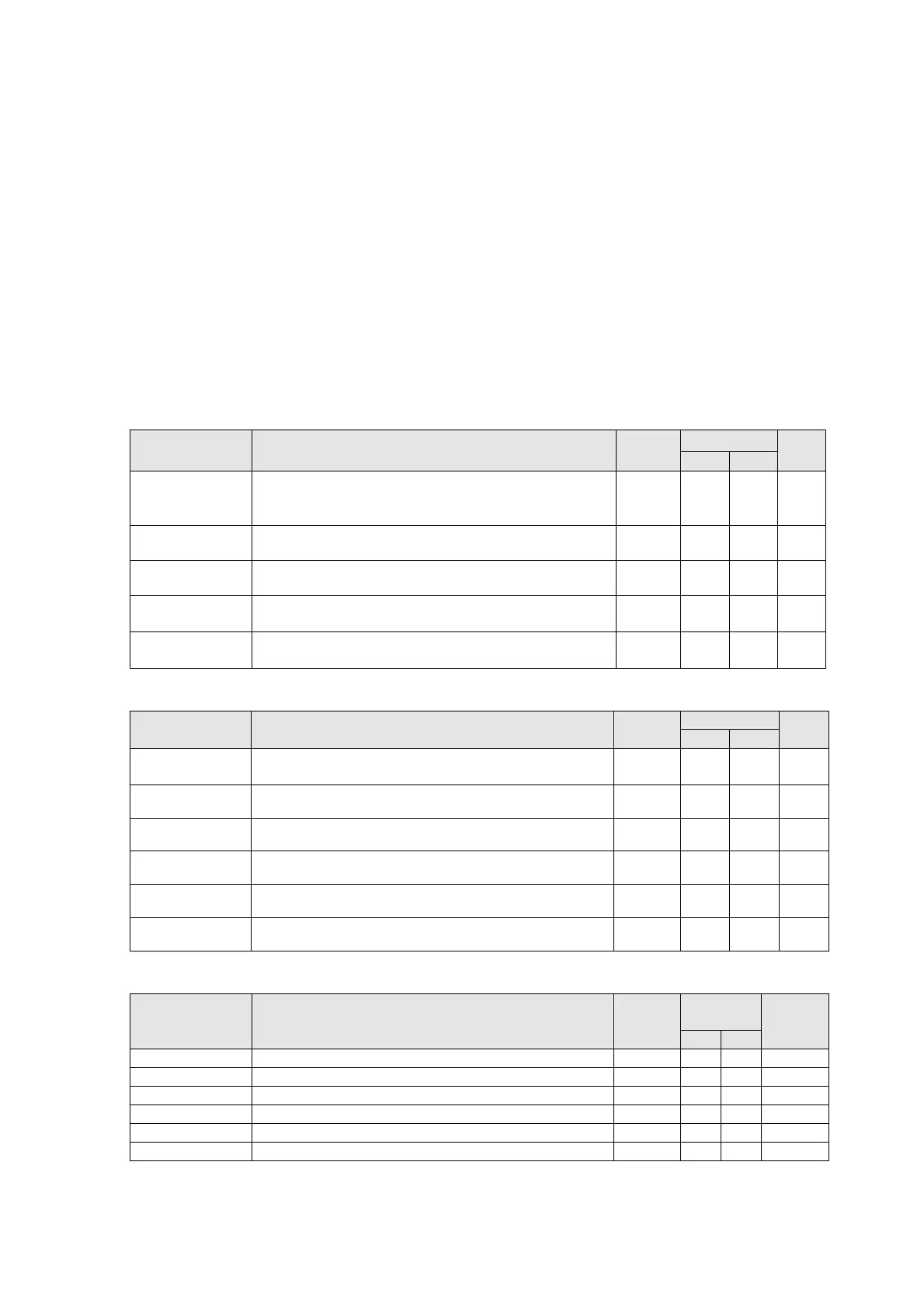
following is the CP2000's current CANopen master data conversion area, which has a range of
D2001+100*n - D2033+100*n, as shown below:
1. The range of n is 0-7
2. ●Indicates PDOTX, ▲Indicates PDORX; unmarked special D can be refreshed using the
CANFLS command
Special D Description of Function Default
PDO Default
R/W
1 2
D2000+100*n
Station number n of slave station
Setting range: 0–127
0: No CANopen function
0 RW
D2002+100*n Manufacturer code of slave station number n (L) 0 R
D2003+100*n
Manufacturer code of slave station number n (H) 0 R
D2004+100*n
Manufacturer's product code of slave station
number n (L)
0 R
D2005+100*n
Manufacturer's product code of slave station
number n (H)
0 R
Basic definitions
Special D Description of Function Default
PDO Default
R/W
1 2
D2006+100*n
Communications break handling method of slave
station number n
0 RW
D2007+100*n Error code of slave station number n error 0 R
D2008+100*n
Control word of slave station number n 0 ● RW
D2009+100*n Status word of slave station number n 0 ▲ R
D2010+100*n Control mode of slave station number n 2 RW
D2011+100*n Actual mode of slave station number n 2 R
Velocity Control
Special D Description of Function Default
PDO
Default
R/W
1 2
D2001+100*n Torque restriction on slave station number n 0 RW
D2012+100*n Target speed of slave station number n (rpm) 0 ● RW
D2013+100*n Actual speed of slave station number n (rpm) 0 ▲ R
D2014+100*n Error speed of slave station number n (rpm) 0 R
D2015+100*n Acceleration time of slave station number n (ms) 1000 RW
D2016+100*n Deceleration time of slave station number n (ms) 1000 RW
 Loading...
Loading...



