Chapter 2 Control Register
2-25
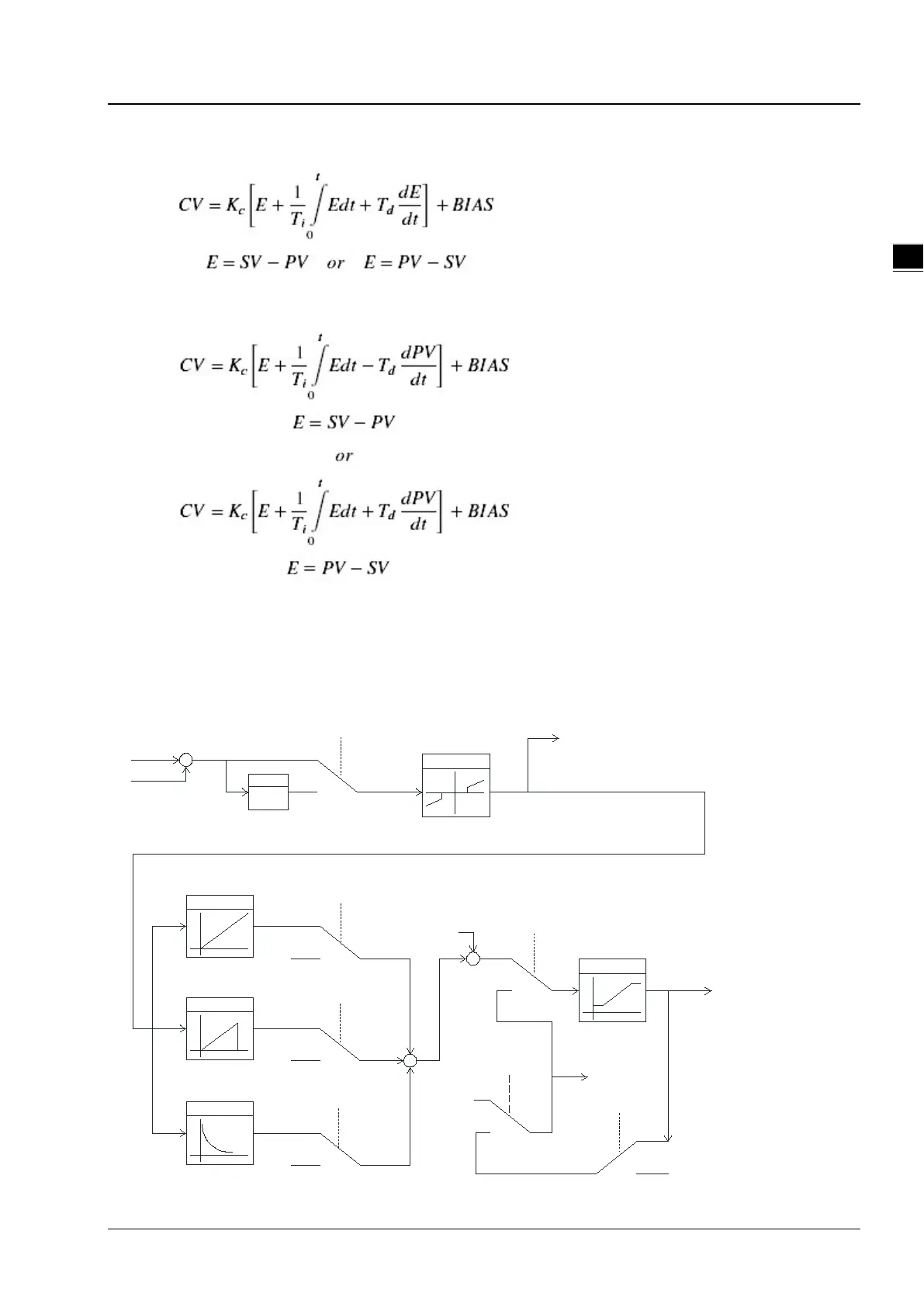
Dependent Formula & Derivative of E(PID_EQ=True & PID_DE=False)
Dependent Formula & Derivative of PV(PID_EQ=True & PID_DE=True)
※ All the CVs stated above are the MVs in the formula.
Auto tuning mode: When auto tuning is done, the value will become 0 and switch to the auto tuning mode automatically.
PID Control Block Diagram:
PID Block Diagram (Independent)
SV
PV
+
-
+
REVERSE
X(-1)
PID_DIR
E
DEAD BAND
ERR_DBW
0
1
PID-P
Kc_Kp
Kc_Kp
>0
<=0
0
PID-I
Ti_Ki
Ti_Ki
>0
<=0
0
0
>0
<=0
PID-D
Td_Kd, Tf
Td_Kd
BIAS
PID_MAN
0
1
0
1
MOUT
MOUT_AUTO
MOUT
PID_MAN
0
1
MOUT
MV
MV_LIMIT
MV_MAX, MV_MIN
+
+
+
+
+
+
+