DVP02TK-S/DVP02TU-S Temperature Control Module Manual
2-26
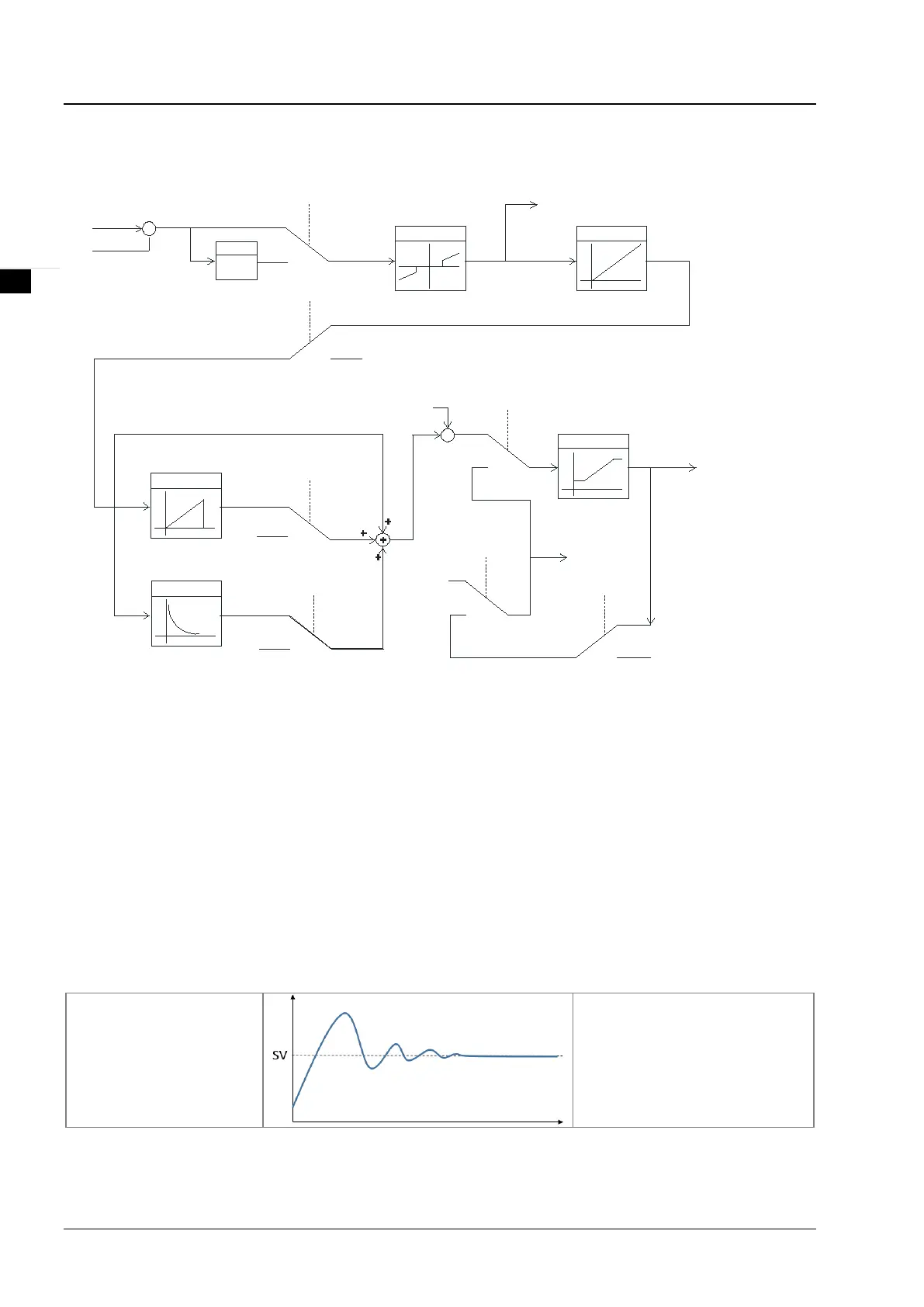
PID Block Diagram (Dependent)
SV
PV
+
-
+
PID-P
Kc_Kp
REVERSE
X(-1)
PID_DIR
0
1
E
DEAD BAND
ERR_DBW
PID-I
Ti_Ki
Kc_Kp
>0
<=0
0
Ti_Ki
>0
<=0
0
PID-D
Td_Kd, Tf
0
>0
<=0
Td_Kd
BIAS
PID_MAN
+
+
+
MV
MV_LIMIT
MV_MAX, MV_MIN
MOUT_AUTO
MOUT
MOUT
PID_MAN
MOUT
0
1
0
1
0
1
Note:
1. When tuning these 3 parameters, Kc_Kp, Ti_Ki and Td_Kd, set the Kc_Kp value first (according to their experiences),
and set the Ti_Ki and Td_Kd value to 0. When it can be controlled, users can increase the values of Ti_Ki and Td_Kd.
When the value of Kc_Kp is 1, it means that the proportional gain is 100%. That is, the error is increased by a factor of
one. When the proportional gain is less than 100%, the error is decreased. When th proportional gain is greater than
100%, the error is increased.
2. The parameters which have been tuned automatically are not necessarily suitable for every controlled environment.
Therefore, users can further modify the automatically-tuned parameters. However, it is suggested to modify the
values of Ti_Ki or Td_Kd only.
PID Tuning Guide:
P gain
Increase P gain
Achieve the target temperature
more quickly with a faster
convergence speed, while
Overshoot being increased.