The value of t
x
in the equation above describes as below.
1.1 When the slope is negative (t1 > t2) 1.2 When the slope is positive (t1 < t2)
As shown in the figure below, assume that the radius of the four-pole motor is r and rotation
speed is n (rpm).
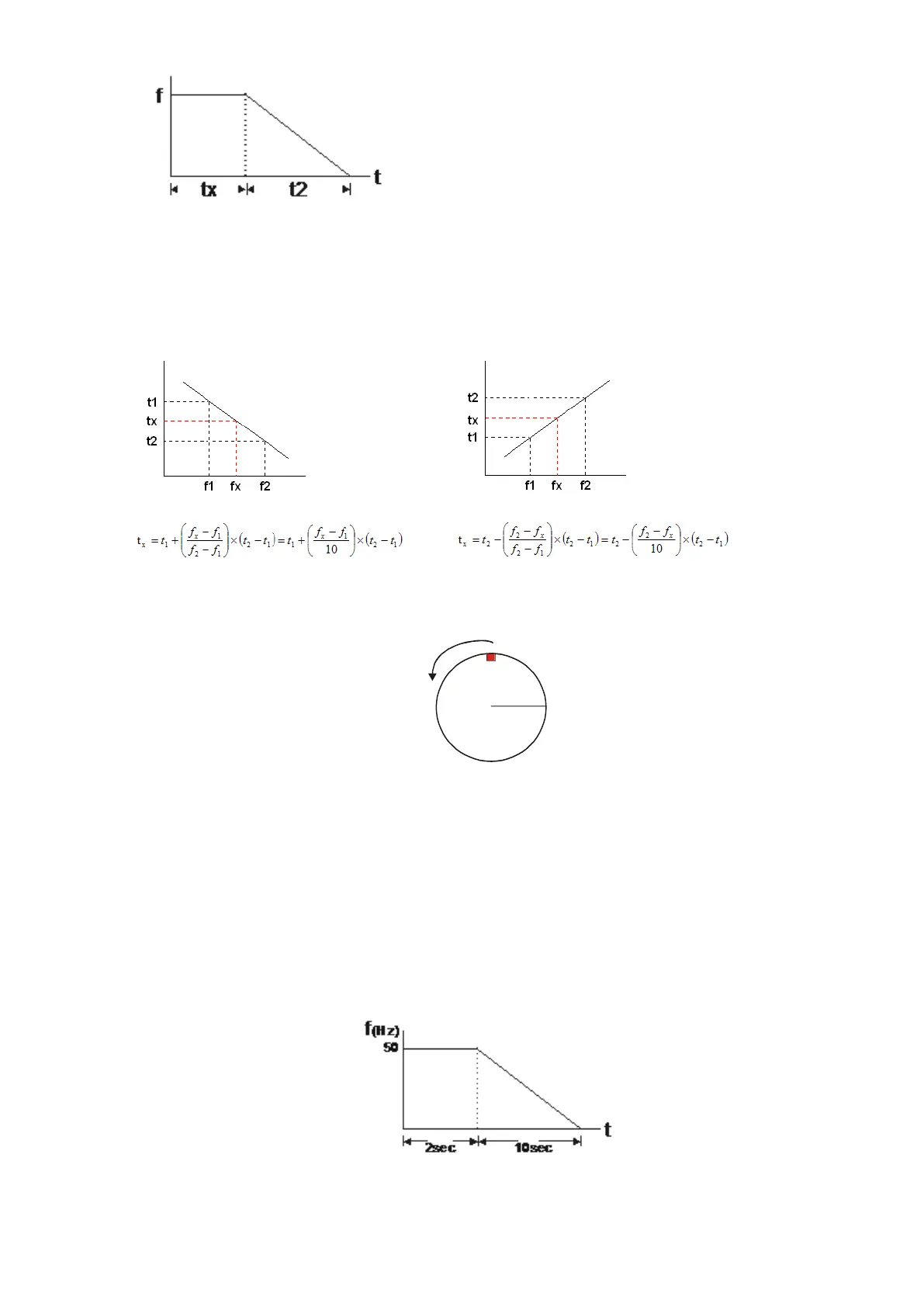
Example 1:
When the motor swivel table rotates at 50 Hz, and Pr.02.02 = 4 (Simple positioning stop; E.F.:
Coast to stop), and Pr.01.26 = 50 Hz (Simple Positioning Stop Frequency 6), and its
corresponding Pr.01.34 = 2 sec. (Simple Positioning Stop Delay Time 6), then the deceleration
time from 50 Hz to 0 Hz is 10 seconds. After executing the stop command, Simple Positioning
Stop activates, its rotation speed is n = 120 x 50 / 4 (revolution / minute) = 25 (revolution/
second)
The number of revolution of the swivel table = (25 × (2 + 12)) / 2 = 175 (revolutions)
Therefore, the motor’s operation distance after executing the stop command = number of
revolutions × circumference = 175 × 2 πr. It also means that the swivel table goes back to the
top after 175 revolutions.
 Loading...
Loading...








