No. 60027, Issue 4. January 1998
7 Programming35
Parameter Purpose
Max Turn @ 100% Speed The purpose of this parameter is to give finer control
of the wheelchair when travelling at high speed. The
Range 0 - 100 % lower the setting, the less sensitive the joystick will
Accessed by : Dealer be. This also helps reduce the effects of inadvertent
joystick movement when travelling over rough
terrain.
At 100 % speed, the turning angle is limited to the
value of this parameter. As the speed reduces, the
available turning angle is allowed to increase.
The higher the value of this parameter, the higher the
speed that the turning angle scaling begins, and the
less the turning angle is limited.
The lower the value, the lower the speed that the
turning angle begins to be scaled, and the greater the
limiting of the turning angle. A lower value is
suitable for high speed (10 km / h) wheelchairs, and
higher values (up to 100%) are suitable for slower
wheelchairs.
Values are assigned to these parameters for each of
the eight Steering Profiles.
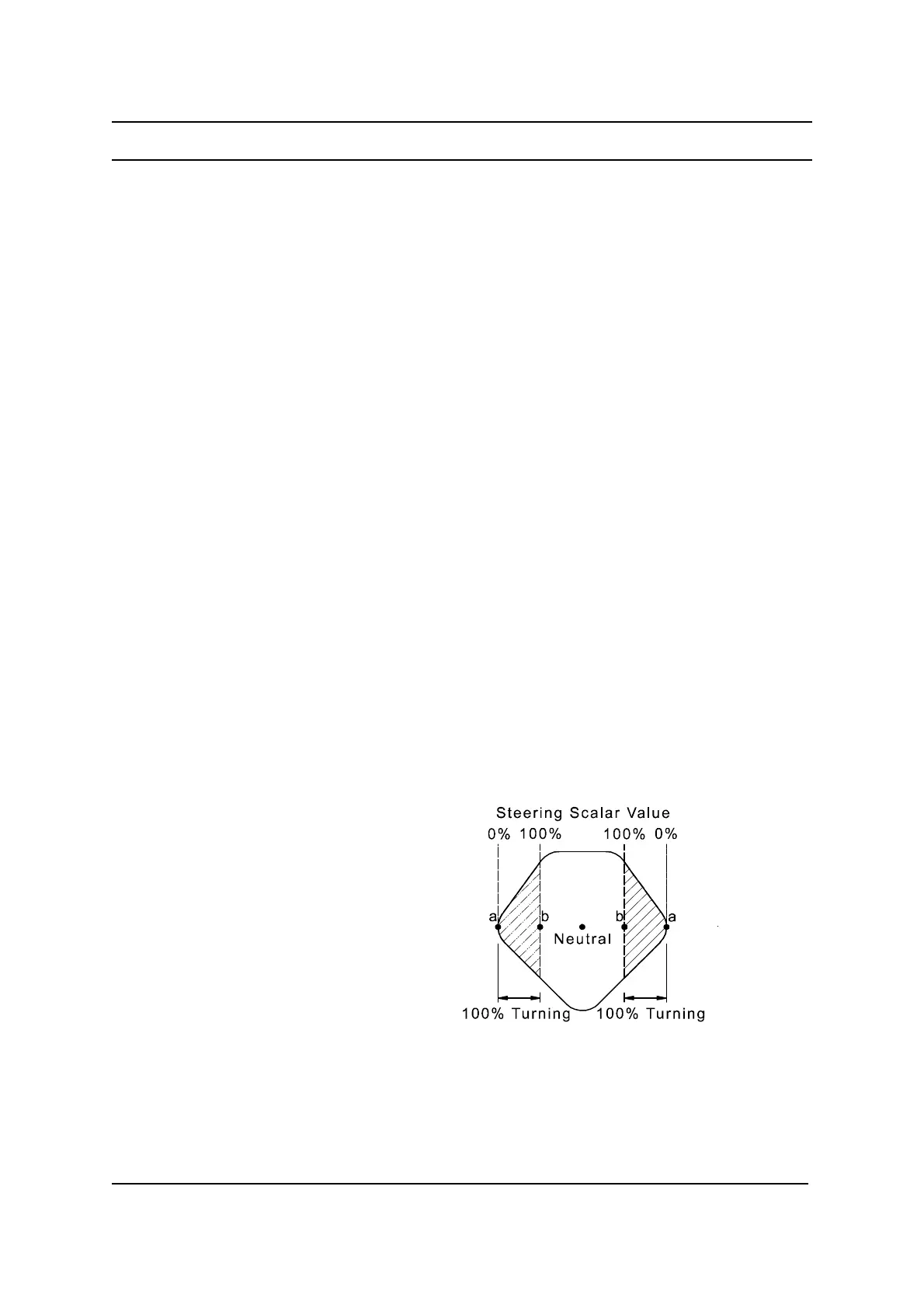
Steering Scalar The Steering Scalar value scales the % turning so
that 100% turning occurs closer to neutral.
Range 0 - 100 %
Accessed by : Dealer
If the Steering Scalar is set to 0%, the joystick must
be deflected to point ‘a’ to achieve 100 % turning.