Product Overview
2-4 FlightDEK-D180 Pilot’s User Guide
ADAHRS Operation
The primary flight instruments on your EFIS display are generated using a group of calibrated sensors. All of them are
solid state – that is, there are no moving parts. These sensors include accelerometers, which measure forces in all three
directions; rotational rate sensors, which sense rotation about all three axes; pressure transducers for measuring air data;
and magnetometers on all three axes for measuring magnetic heading. These sensors form the core of Dynon’s Air Data
Attitude and Heading Reference System (ADAHRS).
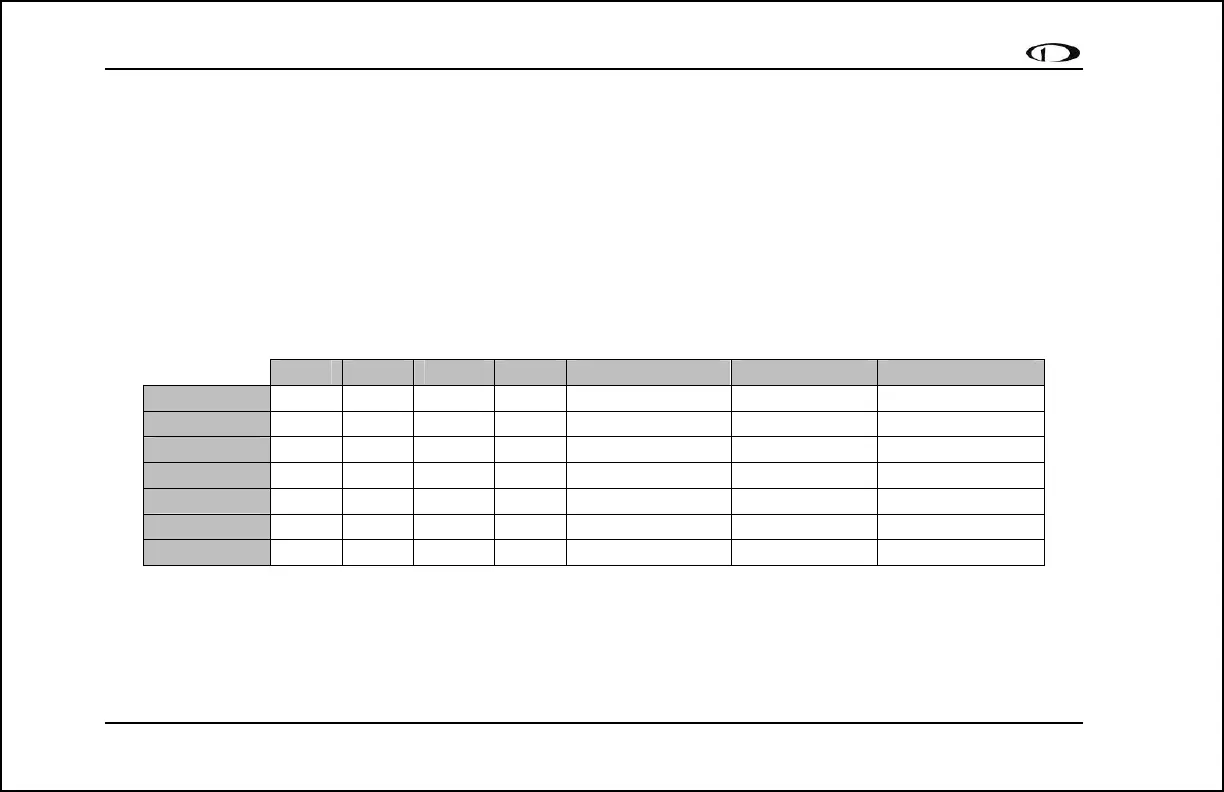
The table below describes which inputs and sensors are used within the EFIS to generate the different displayed
instruments. It is not meant to enable in-flight troubleshooting, but is provided to convey how much of an integrated
system your EFIS is.
GPS Pitot Static AOA Magnetometers Rate Sensors Accelerometers
Ball
X
Altitude
X
Airspeed
X X
AOA
X X X
Turn Rate
X* X X X X
Heading
X* X X X X X
Attitude
X* X* X X X
ATTITUDE CALCULATION
The FlightDEK-D180 artificial horizon display (attitude) is generated via a complex algorithm using a multitude of
sensors. Your EFIS attitude is not reliant on any single external system. It can provide an accurate attitude - even in the
event of airspeed loss (due to icing or other blockage) - via a redundant GPS aiding source. In normal operation the