motion of the robot must be considered during installation, as to prevent the surrounding personnel
and equipment from being bumped.
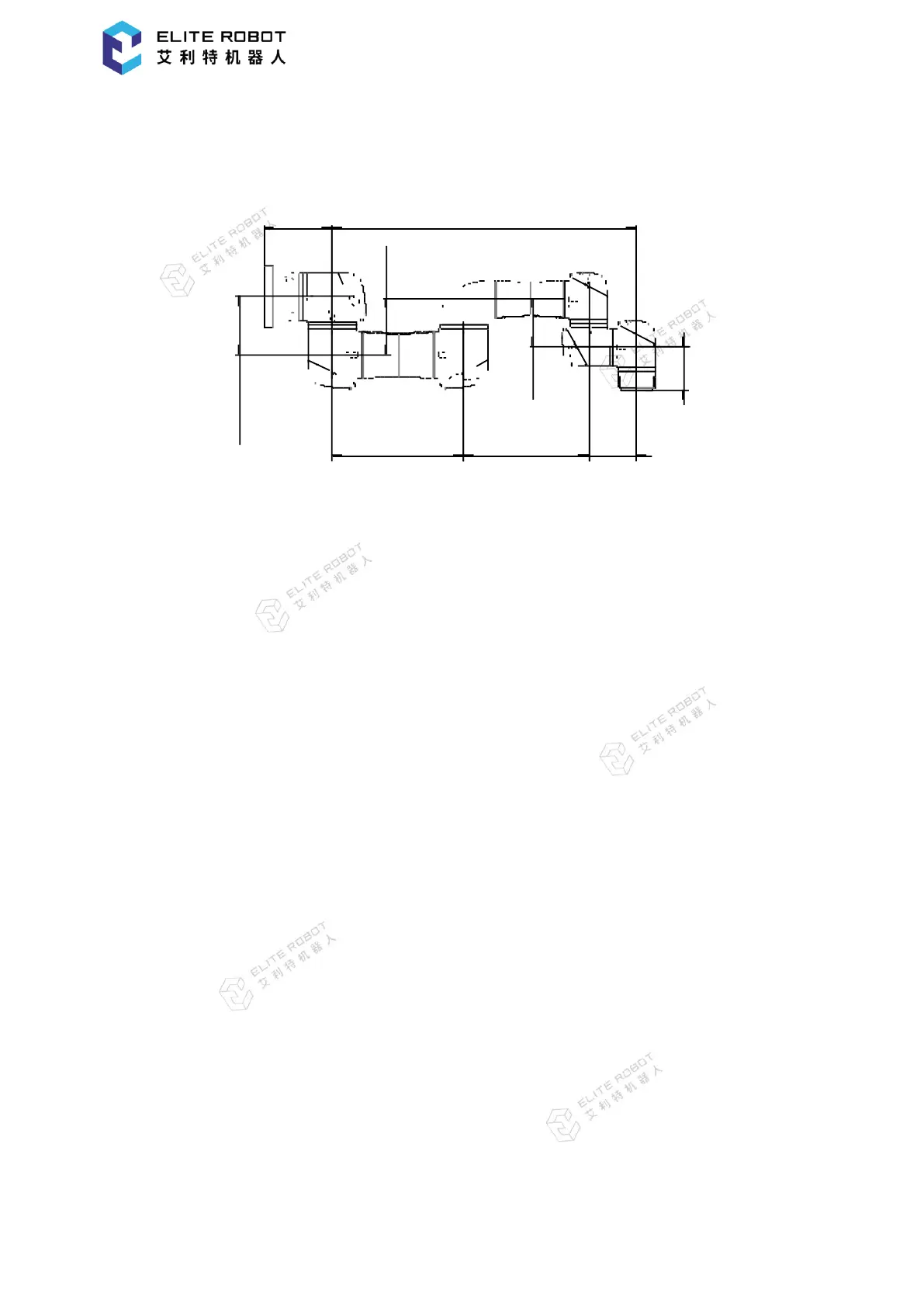
Figure 6-1 Mechanical dimensions diagram of the EC63 robot, with unit of mm
6.3.2 Range of motion of the robot
Figure 6-2 shows the range of motion of the EC63, namely, a sphere with a radius of 624mm
except the cylindrical space directly above and directly below the base. When choosing the
installation position of the robot, the cylindrical space directly above and directly below the robot
must be considered, as to avoid the tool from being moved toward the cylindrical space as far as
possible. In addition, the rotation angle of the joints 1~6 is -360 º to +360 º in practical application.