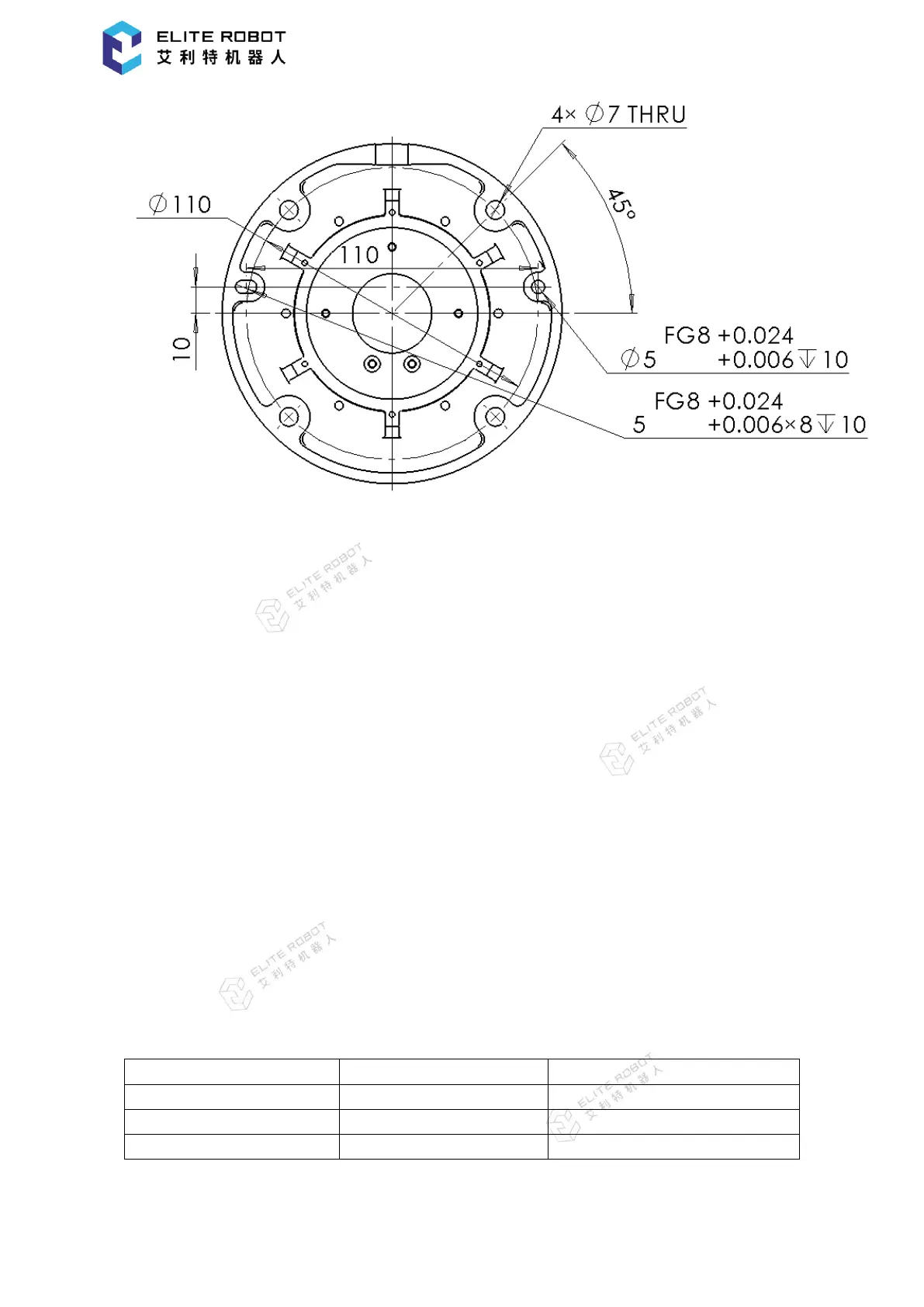
Figure 6-4 Dimensions of installation holes on the base, with unit of mm
1. When installing on the base, the robot should closely contact with a contact surface of the
base, and the surface should be sufficient to bear at least 3500Nm torsional force in a selected
installation direction of the base joints and a weight of at least 100kg. The surface should be free
from vibration. If the robot is installed on a moving platform, an acceleration of the moving platform
should be very low, and a high acceleration would trigger the collision stop function of the robot.
2. The user is recommended to use a base contact surface with strong heat dissipation
performance, such as all-aluminium material. When the operating temperature is greater than 35°C,
the user is strongly recommended to use the material with strong heat dissipation performance.
Make sure the robot arm is correctly and securely installed in place.
If soaked in water for more than a certain period of time, the robot may be damaged. The robot
should not be installed in water or the humid place unless IP67 protection class is declared.
Danger of overturning: if not securely placed on the hard surface, the robot may overturn and
cause damage.
Installation Requirements of the Robot Arm:The robot arm having a 3kg load runs normally
without bumping against the outside, in which a center of gravity of the load is deviated from a
central axis of the tool end for 100mm. Three ways of installation (forward installation, hoisting and
vertical installation) are available, and it is recommended that the minimum anti-overturning force
should be available at each hole position of fixing the bolt of the robot arm.