signal scaling and limiting, feedforward control, override tracking, alarm limit
detection, and signal status propagation.
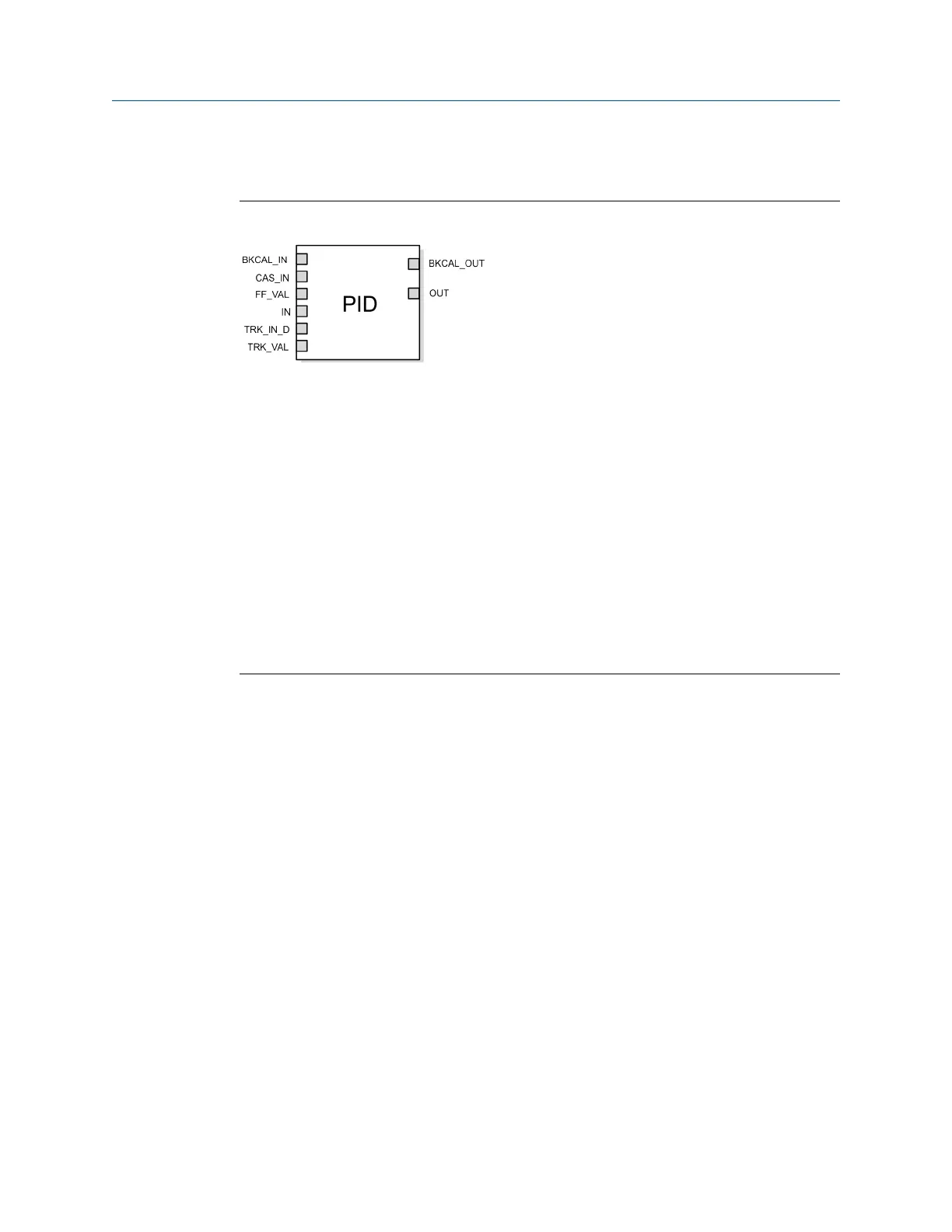
Figure 8-12: Proportional/Integral/Derivative (PID) Function Block
• BKCAL_IN = The analog input value and status from another block's
BKCAL_OUT output that is used for backward output tracking for bumpless
transfer and to pass limit status.
• CAS_IN = The remote setpoint value from another function block.
• FF_VAL = The feedfoward control input value and status.
• IN = The connection for the process variable from another function block.
• TRK_IN_D = Initiates the external tracking function.
• TRK_VAL = The value after scaling applied to OUT in Local Override mode.
• BKCAL_OUT = The value and status required by the BKCAL_IN input of another
function block to prevent reset windup and to provide bumpless transfer to
closed loop control.
• OUT = The block output and status.
The block supports two forms of the PID equation: Standard and Series. You can
choose the appropriate equation using the FORM parameter. The standard ISA
PID equation is the default selection.
Manual FOUNDATION
™
Fieldbus
00809-0500-4880 December 2022
Rosemount OCX8800A 167