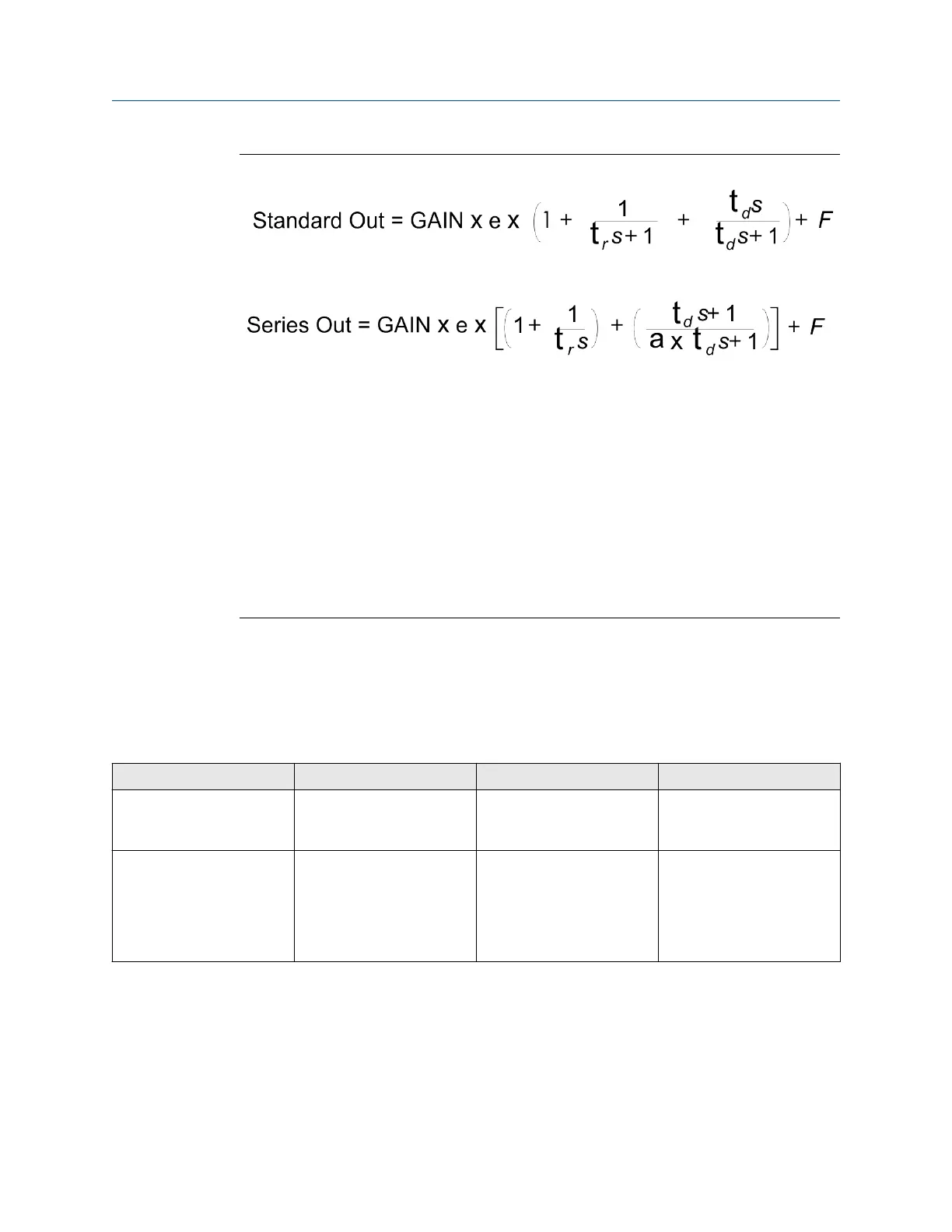
Figure 8-13: PID Equation: Standard and Series
Where:
GAIN Proportional gain value
t
r
Integral action time constant (RESET parameter) in seconds
s A place operator
d Derivative action time rate constant (RATE parameter)
a Fixed smoothing factor of 0.1 applied to RATE
F Feedforward control contribution from the feedforward input (FF_FVAI
parameter)
e Error between setpoint and process variable
To further customize the block use for your application, you can configure
filtering, feedforward inputs, tracking inputs, setpoint and output limiting, PID
equation structures, and block output action. Table 8-25 lists the PID block
parameters and their descriptions, units of measure, and index numbers, and
Figure 8-14 illustrates the internal components of the PID function block.
Table 8-25: PID Function Block System Parameters
Parameter Index number Units Descriptions
ACK_OPTION 46 None Used to set auto
acknowledgement of
alarms.
ALARM_HYS 47 Percent The amount the alarm
value must return to
within the alarm limit
before the associated
active alarm condition
clears.
FOUNDATION
™
Fieldbus Manual
December 2022 00809-0500-4880
168 Emerson.com/Rosemount