Maintenance 5. Joint #1
LS20-B Rev.4 95
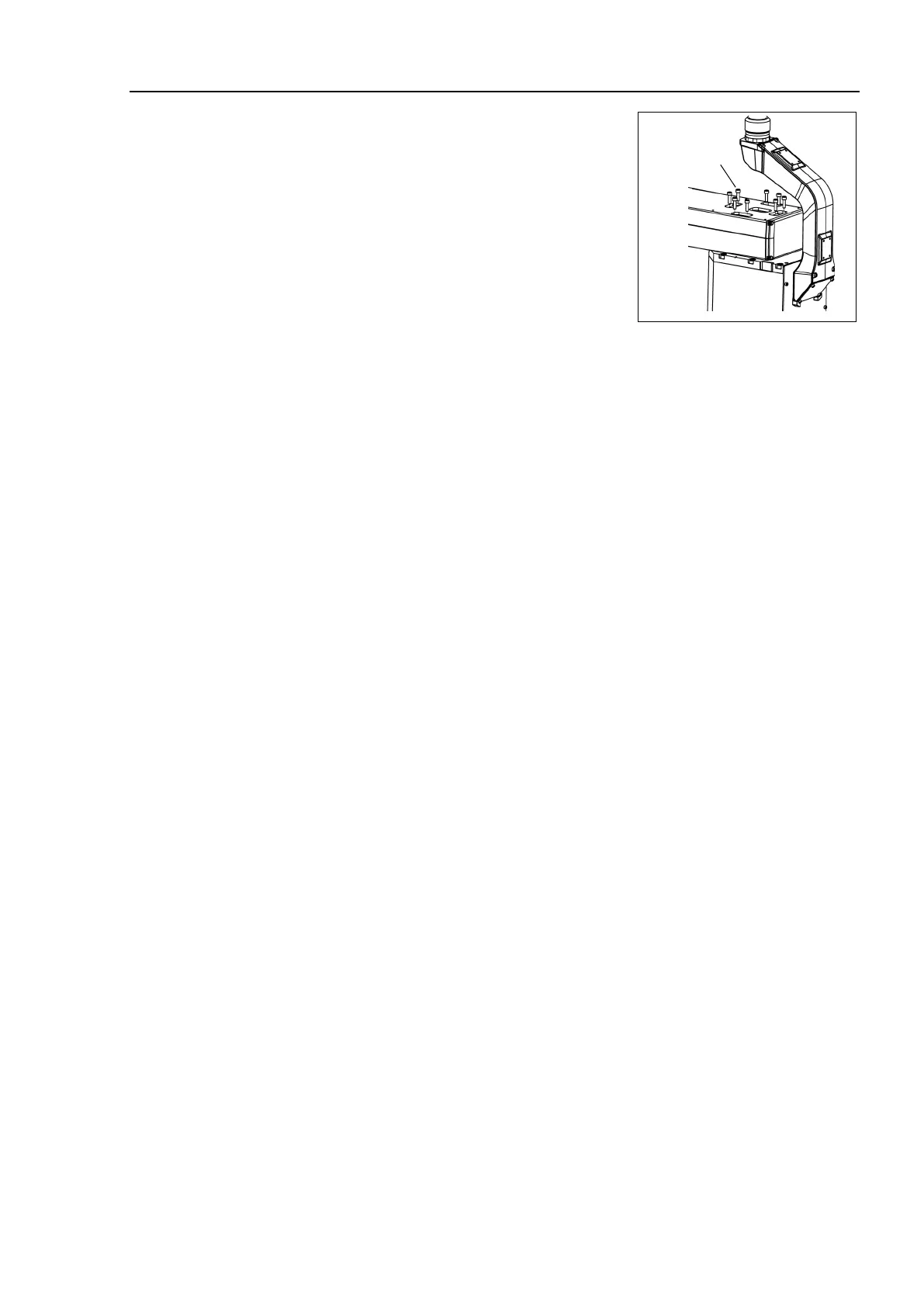
Mount the Arm #1 to the Joint #1 unit.
Tightening torque: 18 N·m
Operating the Manipulator with improper
tightening torque may cause positioning gap and
damage on the screw and screw hole.
Mount the cover to the Arm #1.
For details, refer to Maintenance: 3.3 Arm #1 Cover.
Connect the following connectors
.
Connectors: X41, X211
Mount the Connector Plate.
Maintenance 3.4 Connector Plate.
Check if the Joint #1 moves in a Jog motion by operating from
EPSON RC+ menu
Tools]-[Robot Manager]-[Jog & Teach].
If the Manipulator oscillates with
MotorON and the following errors are detected,
Error 5041: Motor torque output failure in low power state.
Error 4241: Over speed during low power mode was detected.
or when the joint other than Joint #1 moves, the connector for the other joint might be
connected to the Joint #1 motor. Check the connector connection.
10)
Execute the calibration for the Joint #1.
For details refer to Maintenance: 13. Calibration.

 Loading...
Loading...






