Setup & Operation 1. Safety
LS20-B Rev.4 9
Free running distance in emergency
The operating Manipulator cannot stop immediately after the Emergency Stop switch is
pressed.
The free running time/angle/distance of the Manipulator are shown below.
However, remember that the values vary depending on following conditions.
Weight of the end effector Weight setting
Weight of work piece Speed setting
Operating pose Accel setting
Conditions for Measurement
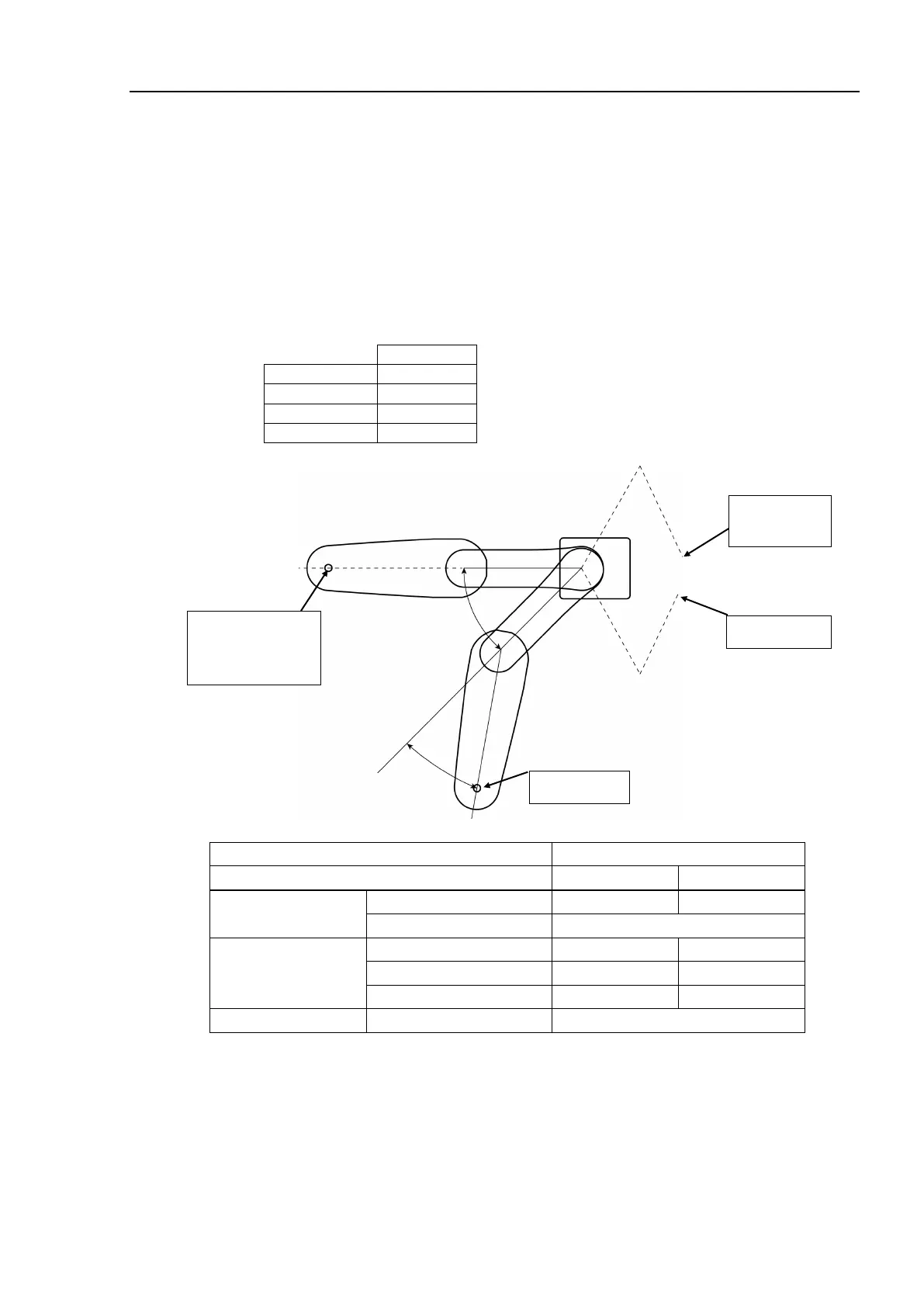
Joint #1
Stop point
Point where the
emergency stop
signal is input
Target point
Start point of
operation
Joint #2
Controller RC90-B
Manipulator LS20-B804* LS20-BA04*
Free running time
Joint #1 + Joint #2 [sec.] 0.60 0.65
Joint #3 [sec.] 0.3
Free running angle
Joint #1 [°] 65 85
Joint #2 [°] 63 55
Joint #1 + Joint #2 [°] 120 125
Free running distance Joint #3 [mm] 50

 Loading...
Loading...






