Maintenance 7. Arm #3
106 LS20 Rev.4
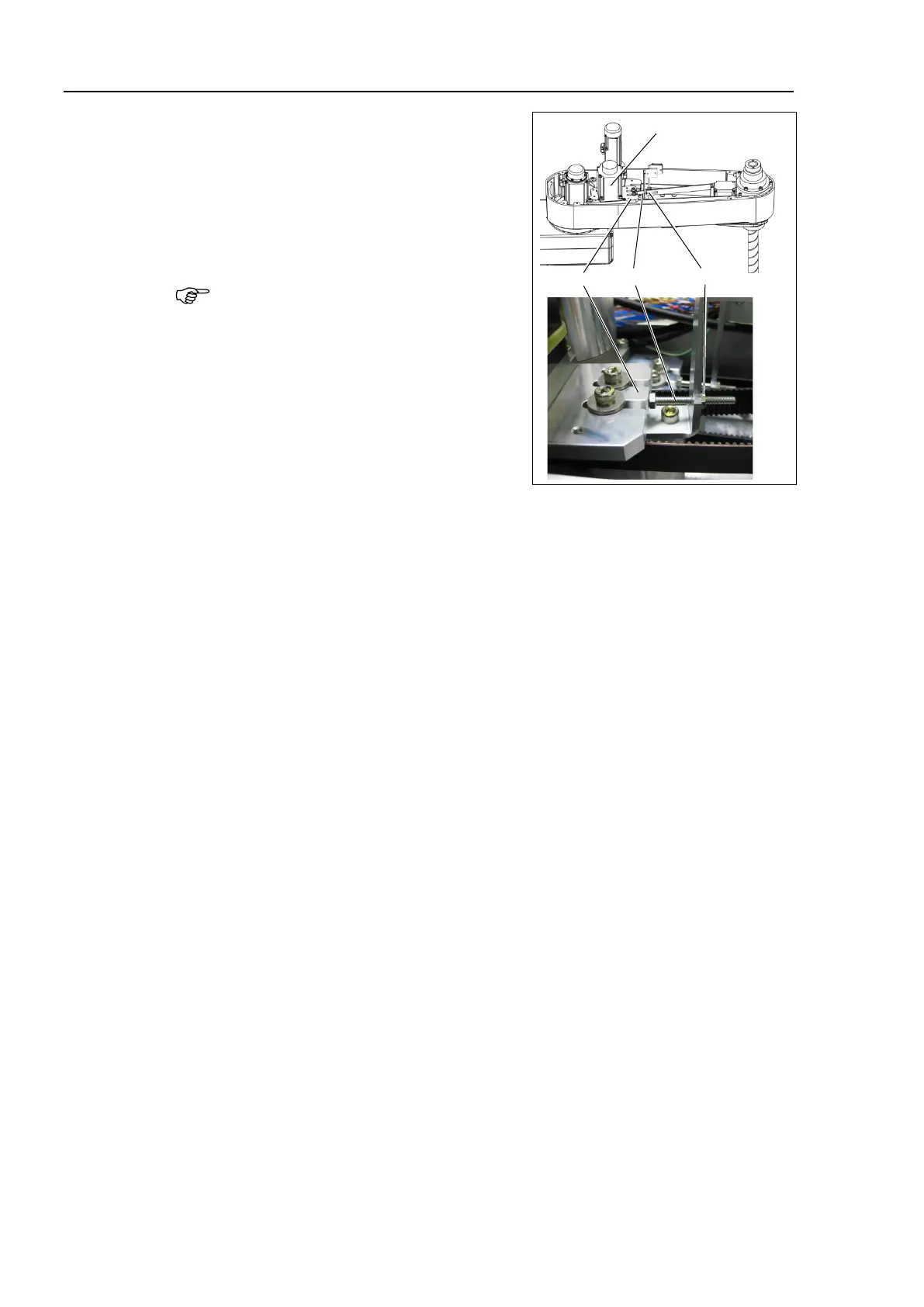
Apply the proper tension to the
Z belt, and
secure the Joint #3 motor unit.
Z belt tension:
: 93 N (9.5 ± 0.75 kgf)
Axial tension (if being pulled): 186 N
To apply tension to the Joint #3 motor unit,
use the bolt at the front.
-1
turn the bolt.
Push in the Joint #3 motor unit.
-2
After fixing the Joint #3 motor
unit, turn the bolt to leave from the
plate.
-3
Check the tension using the ultrasonic tension meter.
For details, refer to Maintenance 7.4 Checking the Timing Belt Tension.
-4
-1 through (4)-3 until you get appropriate tension.
-5
After the adjustment, put the bolt back to its original position and fix it
with the nut.
X231, X31
6)
Install the clip band removed in
the
removal step (5), bind the cables, and then fix
them.
Do not allow unnecessary strain
on the cables.
Arm Top Cover.
Maintenance: 3.1 Arm Top Cover.
moves in a Jog motion by operating from EPSON RC+ menu -
-[Robot Manager]-[Jog & Teach].
If the Manipulator oscillates with MotorON and the following errors are detected,
Error 5041: Motor torque output failure in low power state.
Error 4241: Over speed during low power mode was detected.
or when the joint other than Joint #3 moves, the connector for other joint might be
connected to the Joint #3 motor. Check the connector connection.
9)
Execute the calibration of Joints #3, #4.
For details, refer to Maintenance: 13. Calibration.

 Loading...
Loading...





