3. Product description
54 Festo P.BE-CMMS-AS-HW-EN en 0708NH
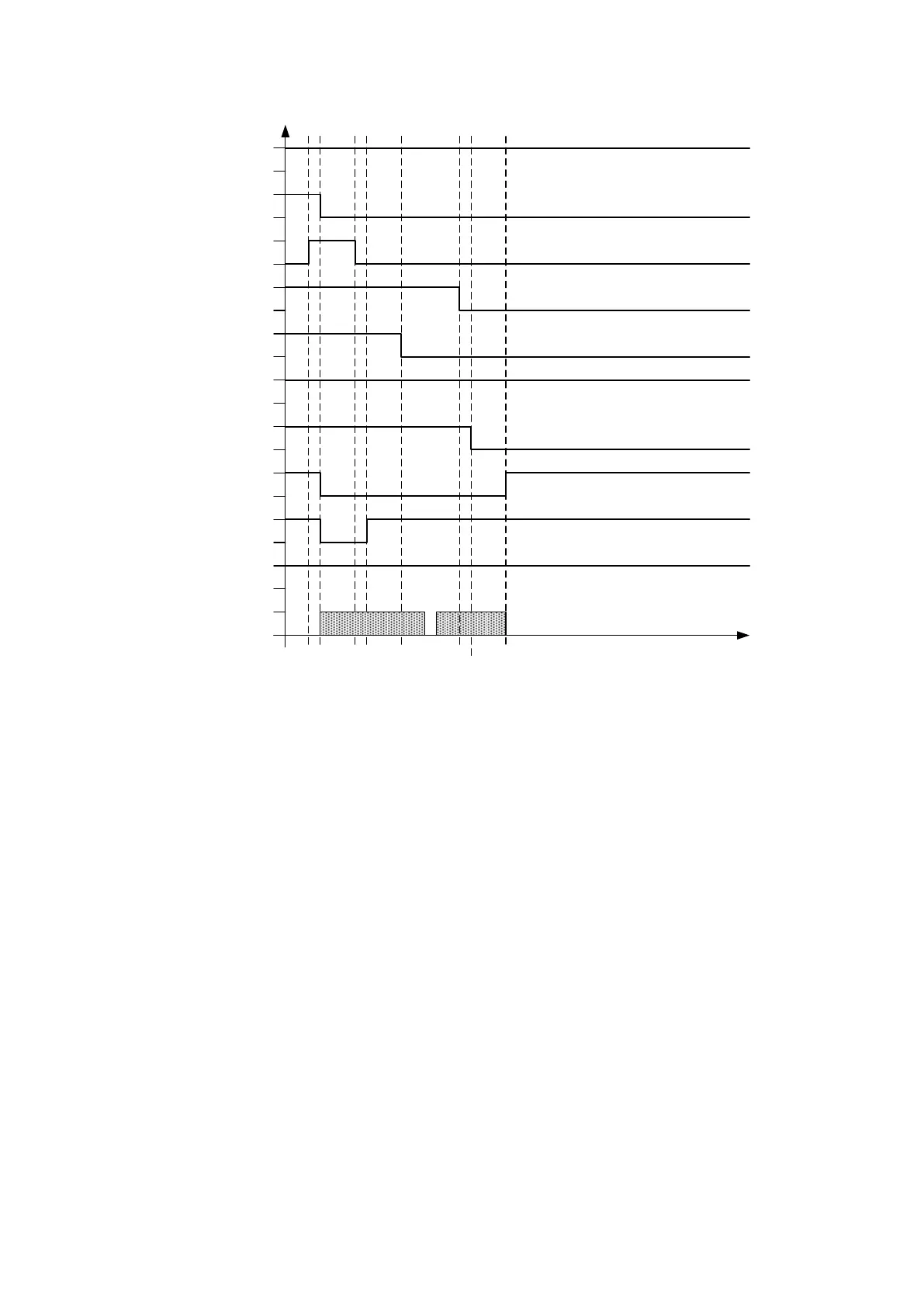
Controller
release
START
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Limit switch E0
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
Statusword:
referenced
1
Limit switch E1
0
1
0
– +
STOP
1
0
t1 t1 t1tx txtx tx
t1 =1.6 ms
tx = x ms (dependent on ramps)
Fig. 3.6Signal sequence with interruption through STOP input
3.5.8 Trajectory generator
With a start signal for a positioning set via DIN8, field bus or RS232
interface, the selected positioning set is loaded into the trajectory generator.
Based on the data record loaded, the necessary internal pre-calculations are made.
The pre-calculations can take up to 5 ms. The following programmable possibilities
are available for processing the start signal:
- A start signal detected during an ongoing positioning run is ignored (ignoring).
- After a start signal is detected during an ongoing positioning run, the run con-
tinues to the end (waiting).
- After a start signal is detected, positioning is cancelled and the drive runs at a
constant speed. After pre-calculation is completed, the drive runs to the new
target position (interrupting).
The trajectory generator sends the following messages:
- Target reached, (Default: digital output DOUT1 - MC)
- Remaining distance reached.
 Loading...
Loading...







