6-6 MM2 Motor Manager 2
GE Power Management
6.2 MODBUS FUNCTIONS 6 COMMUNICATIONS
6
6.2.2 FUNCTION CODE 03H
Modbus implementation: Read Holding Registers
MM2 implementation: Read Setpoints and Actual Values
For the MM2 implementation of Modbus, this command can be used to read any setpoints ("holding
registers") or actual values ("input registers"). Holding and input registers are 16 bit (two byte) values
transmitted high order byte first. Thus all MM2 Setpoints and Actual Values are sent as two bytes.
The maximum number of registers that can be read in one transmission is 125. This function code is
identical to function code 04.
The slave response to this function code is the slave address, function code, a count of the number
of data bytes to follow, the data itself and the CRC. Each data item is sent as a two byte number with
the high order byte sent first.
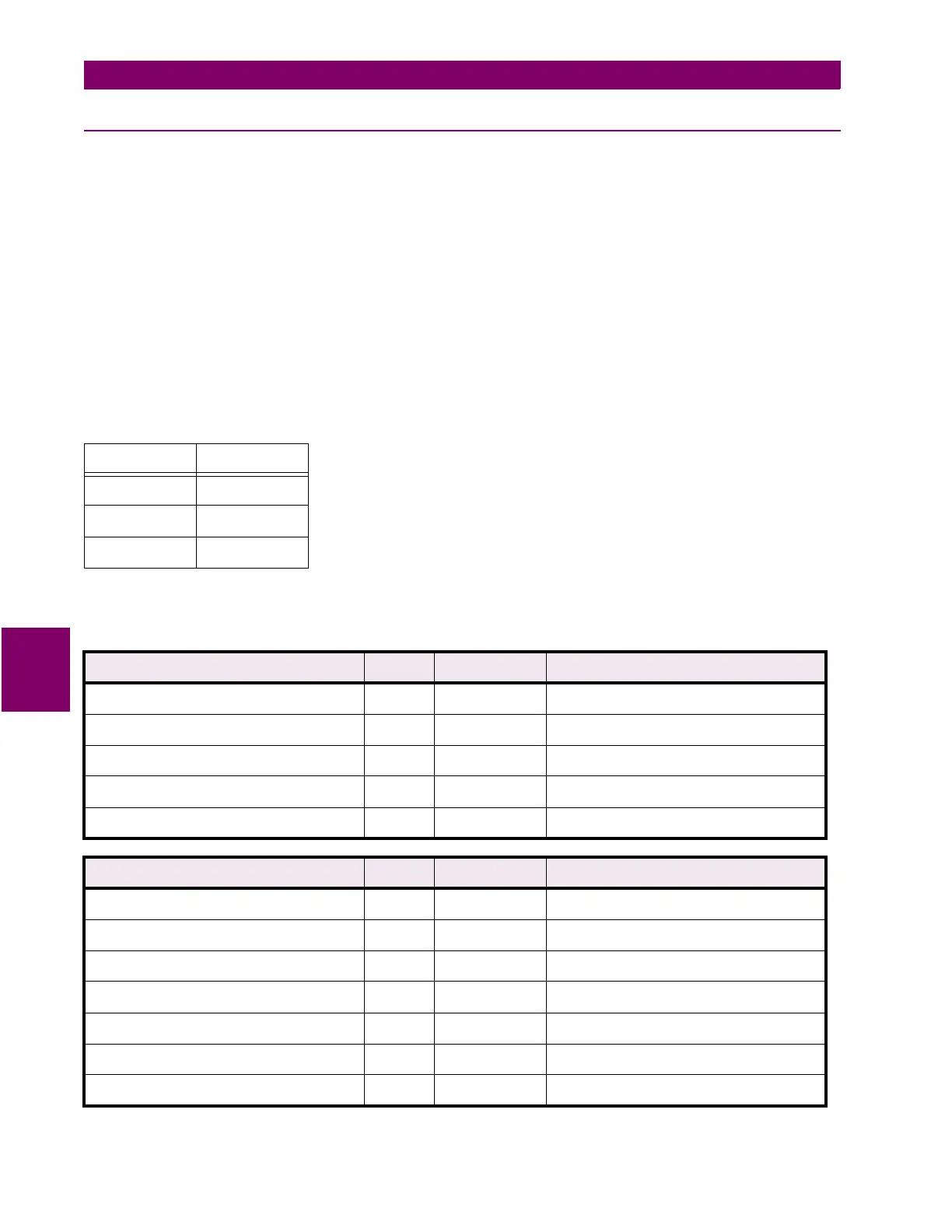
For example, consider a request for slave 17 to respond with 3 registers starting at address 006B.
For this example the register data in these addresses is as follows:
The master/slave packets have the following format:
Address Data
006B 022B
006C 0000
006D 0064
Table 6–2: MASTER/SLAVE PACKET FORMAT FOR FUNCTION CODE 03H
MASTER TRANSMISSION BYTES EXAMPLE DESCRIPTION
SLAVE ADDRESS 1 11 message for slave 17
FUNCTION CODE 1 03 read registers
DATA STARTING ADDRESS 2 00 6B data starting at 006B
NUMBER OF SETPOINTS 2 00 03 3 registers = 6 bytes total
CRC 2 76 87 CRC error code
SLAVE RESPONSE BYTES EXAMPLE DESCRIPTION
SLAVE ADDRESS 1 11 message from slave 17
FUNCTION CODE 1 03 read registers
BYTE COUNT 1 06 3 registers = 6 bytes
DATA 1 (see definition above) 2 02 2B value in address 006B
DATA 2 (see definition above) 2 00 00 value in address 006C
DATA 3 (see definition above) 2 00 64 value in address 006D
CRC 2 54 83 CRC error code