134 ADV200 • Functions description and parameters list
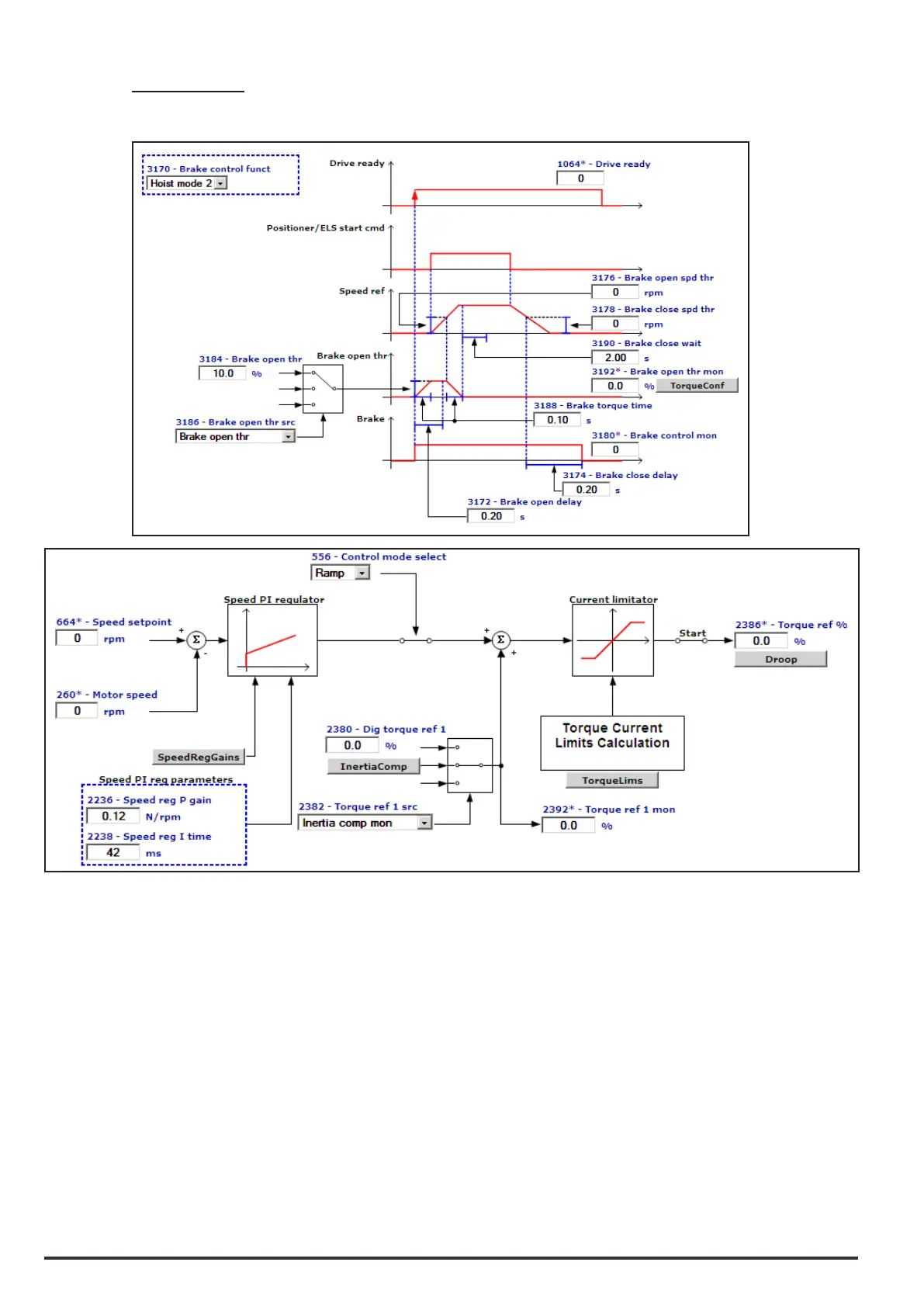
“Hoistmode2”:
This mode can only be used when the “Positioner” application is installed in the drive.
Openingphase:
Setting of parameters 3172, 3176, 3184, 3186, 3188 and 2382.
Parameter 2382 Torqueref1src (menu 20 - TORQUE CONFIG) must be set to PAR 3192 Brakeopenthr
mon.
Parameter 3182 Brakeopenthrsel is not considered, in that regardless of its value, the values considered
are always to be taken as “torque” and not “current” (since the positioner can only be used in FluxvectorCL
mode).
When the “Driveready” (enable drive) signal switches from 0->1 the open brake command is sent immedi-
ately. At the same time, parameter 3192 Brakeopenthrmon, added to the TORQUECONFIG block, starts
to increase in value from 0 up to the threshold value dened on the output of the selector associated with the
pair of parameters 3184/3186. This value increases over a ramping up time settable in parameter 3188 Brake
torquetime. Parameter 3188 must be set to a value close to the brake open delay (i.e. the time it takes for the
brake to be opened after the open command is sent). This ramp can be monitored via parameter 2392 Torque
ref1mon, visible in the diagrams of GF_eXpress.
When the Start positioner command (in the list of commands of the “Positioner” application) is sent, the value
of parameter 664 Speedsetpointis increased. When this speed reference reaches the threshold dened by

 Loading...
Loading...











