Microlab
®
STAR User Manual
610766/02 Page 23 of 225
'HVFULSWLRQRIWKH0LFURODE67$5
7KH6WDQGDUG0LFURODE67$5
STAR stands for Sequential Transfer and Aliquoting Robot. The Microlab STAR performs
pipetting operations on liquids in containers placed on its work surface.
The basic model Microlab STAR contains a work surface, called a deck, for placing movable
carriers. These carriers hold reagent containers, such as tubes, microtiter plates, or other
kinds of labware.
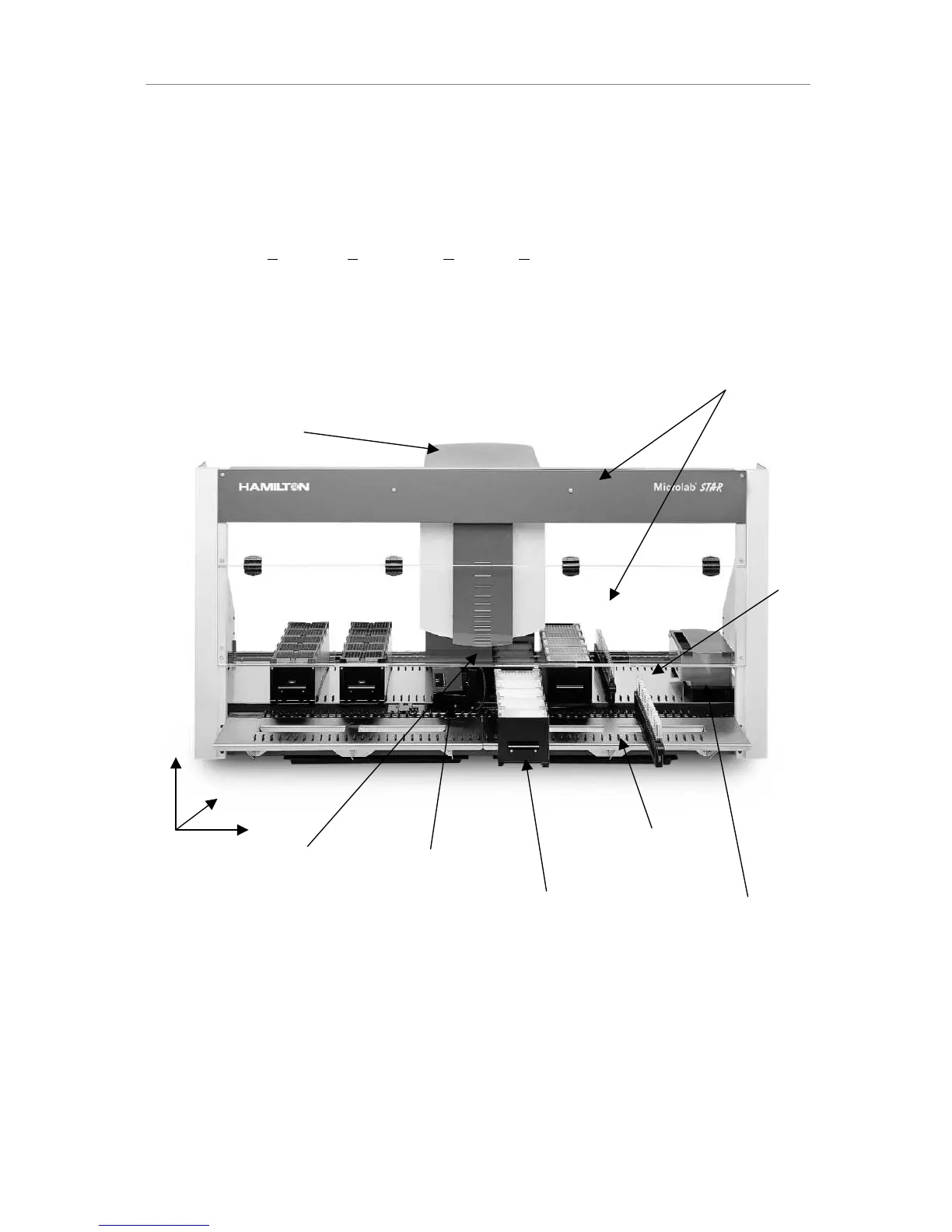
7KH0LFURODE67$5
The Microlab STAR’s deck is divided into 54 equal tracks (T) for loading carriers with
predetermined positions. This obviates the need for precise measurement of positions. The
deck has partitions for a maximum of 54 specialised 1-T carriers for sample tubes, or a
maximum of 9 6-T carriers for microtiter plates and CO-RE tips. An additional partition space
is provided for the tip waste container.
Carrier for tubes,
microtiter plates,
etc.
Waste