5. Parameter Setting
5-34
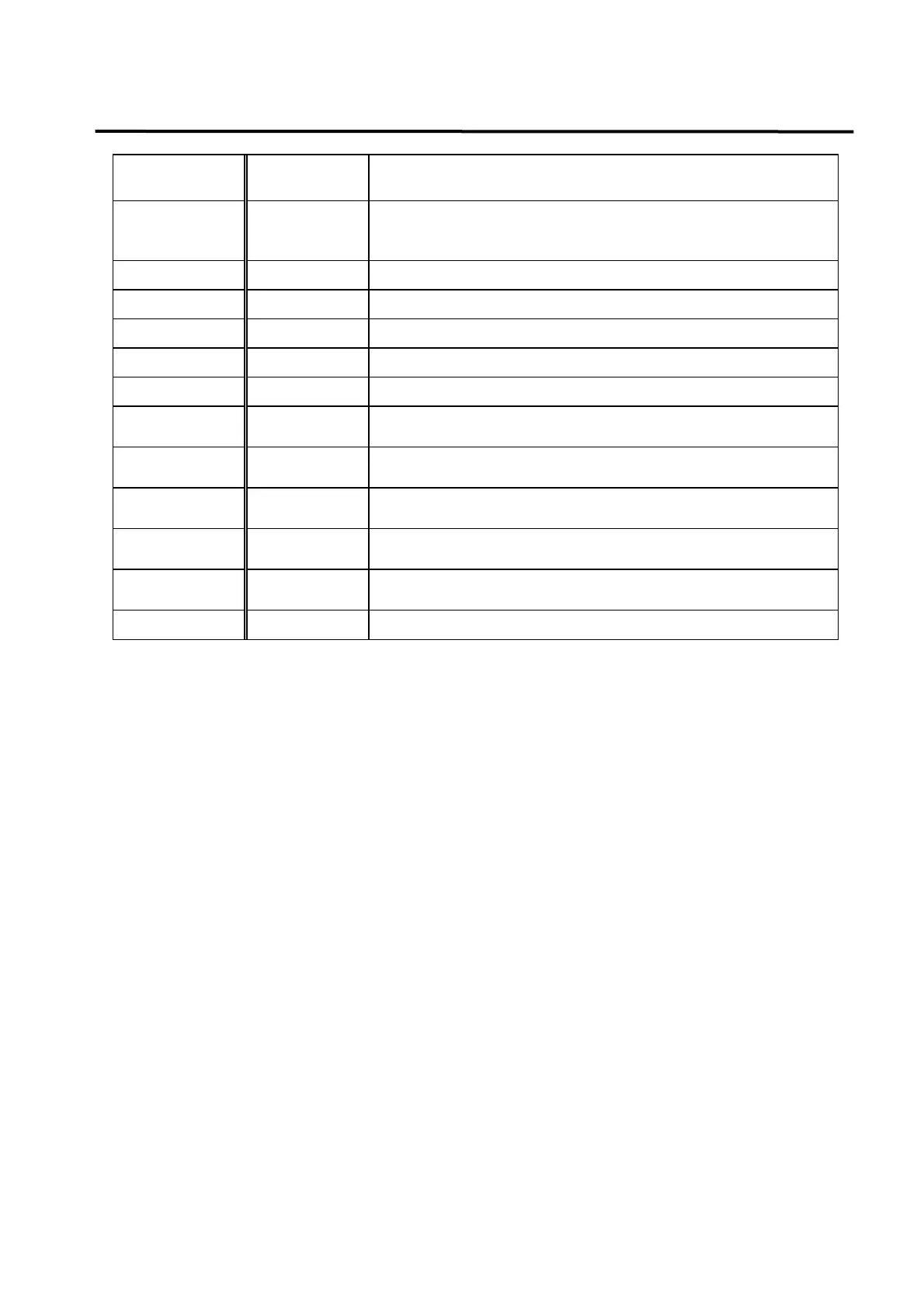
AL-06 OVER SPEED
Gain excessiveness, menu set value error, excessive gravity
load
AL-07 FOLLOW ERR
Rapid deceleration/acceleration, gain set value error,
command pulse frequency excessive (greater than 300
kpps), miswiring, mechanical overload
AL-08 Output NC Output (U, V, W) open phase
AL-09 PPR ERROR Encoder pulse level setting error
AL-10 ABS DATA Absolute value encoder data transmission error
AL-11 ABS BATT Battery level below 2.8V
AL-12 ABS MDER Absolute value encoder multi-rotation data transmission error
AL-13 ORG ERR Origin Search Err.
AL-14 ERASE FAIL Parameter Erase Err.
AL-15 WRITE FAIL Parameter Write Err.
AL-16 PARA INIT Parameter Initial Fail
Parameter Err 1
Unchangeable parameter input tried during servo ON,
parameters locked
Parameter Err 2 Set value input error
In case of an alarm, the alarm signal output contact(ALARM) is turned off and the motor stops by
the action of the dynamic brake.
To reset the contents of current alarms, use the Alarm Reset (ALS02) menu, or use the input
contact ALMRST (CN1-38) terminal.
The submenu of Alarm History (ALS03) includes Alarm 1, Alarm 2, Alarm 3, Alarm 4, Alarm 5, Alarm
6, Alarm 7, Alarm 8, Alarm 9, and Alarm 10 which are the past alarms. Alarm 1 indicates the latest
alarm, while the remaining alarms indicates those which occurred previously.
To reset all past alarm history, use the menu Alarm Reset All (ALSO4). However, EMER STOP (AL-
00) cannot be stored in the Alarm History (ALS03).