Chapter 6. Operation Mode and How to use
6-11
Note2) Can specify origin equivalent to the position which z phase position fixed distance by using
ORG Offset[P6-04]
Note3) In case of using Damper(13-16) set torque in ratings torque ratio(%) for recognition in
collision with damper.
Note4) When servo in ON, in case that do origin execution, set automatic origin operation[P8-08]
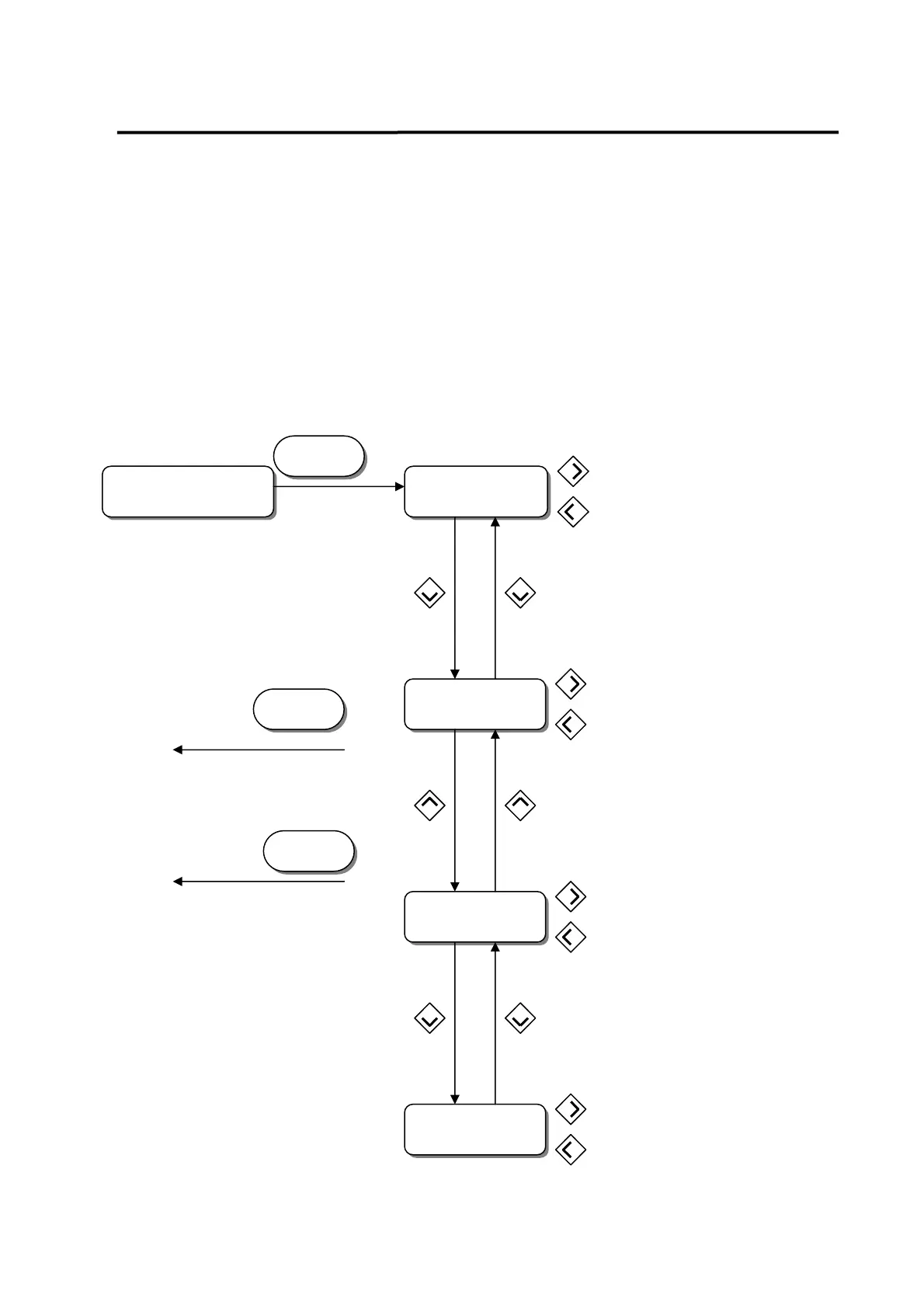
6.7 How to JOG operation
JOG mode is comprised of subordinate menu of position coordinates input(position command mode
P5--) and, Jog mode is enable the digital loader without outer contact signal.
Save current position data
operated by Jog to
position order value
Close no change of
current position
order value
Position CMD__ JOG State0
CW (increase coordinates value)
CCW (decrease coordinates value)
ENTER
JOG State1
CW (increase coordinates value)
CCW (decrease coordinates value)
IJOG State0
CW(increase coordinates value)
CCW (decrease coordinates value)
IJOG State1
CW(increase coordinates value)
CCW(decrease coordinates value)
Set speed of rotation [P6-05]
Set speed of rotation [P6-06]
Set number of rotation [P6-08]
Set number of rotation [P6-07]
ENTER
PROG