Discovery QDR Series Technical Manual
2-9
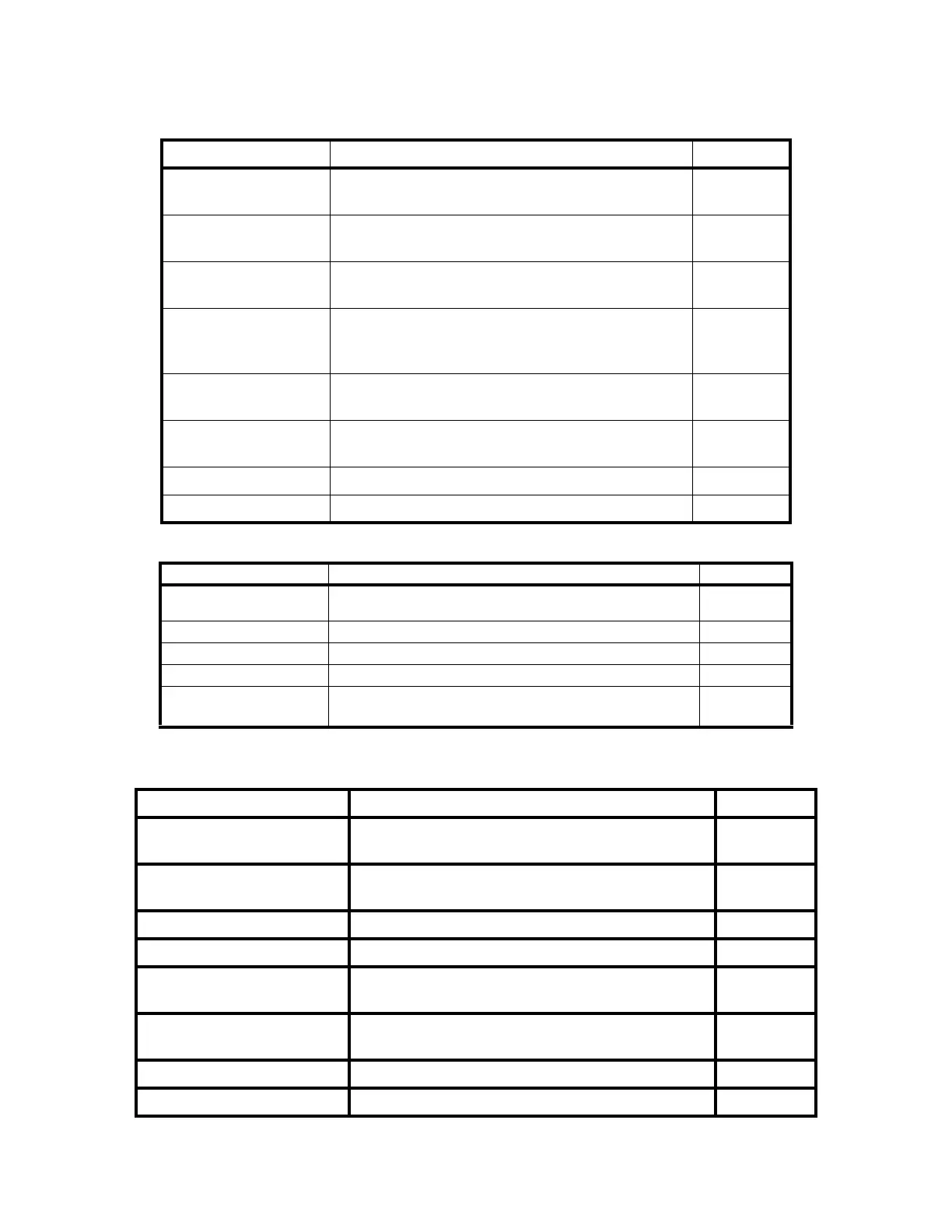
Table 2-5. Distribution Board/TZ Drive Board Interconnection Descriptions
Table 2-6. DIN Rail Assembly/TZ Drive Board Interface Descriptions
Table 2-7. TZ Drive Board/Pedestal Motors and Position Encoders
Interconnection Descriptions
Signal Description Pin(s)
ARD+
ARD-
Asynchronous Receive Data. JP1-11
JP1-12
ATD+
ATD-
Asynchronous Transmit Data. JP1-14
JP1-15
SYSRST+
SYSRST-
System Reset. Resets the TZ Drive board. JP1-17
JP1-18
EMERGENCY+
EMERGENCY-
Enables manual operation of the pedestals in the case
of an emergency (under control of the Control Panel
Table switch on the Patient Table).
JP1-20
JP1-21
MAN_UP*
MAN_UP_RET
Raises the Patient Table in the case of an emergency. JP1-23
JP1-24
MAN_DWN*
MAN_DWN_RET
Lowers the Patient Table in the case of an emergency. JP1-26
JP1-27
+24V DC power for the Motor Controller board. JP1-5, JP1-6
+6.5V Not used. JP1-2, JP1-3
Signal Description Pin
120V(A)_LEFT AC voltage (120) to drive the Left Pedestal motor. JP6-4
120V(B)_LEFT AC voltage (120) to drive the Left Pedestal motor. JP6-5
120V(A)_RIGHT AC voltage (120) to drive the Right Pedestal motor. JP6-1
120V(B)_RIGHT AC voltage (120) to drive the Right Pedestal motor. JP6-2
GND_PED Ground line to the Left/Right Pedestal motor. JP6-3/JP6-
6
Signal Description Pin
120V(A)_UP_LEFT AC voltage to the Left Pedestal motor to move the left
end of the Patient Table up.
JP5-1
120V(A)_DWN_LEFT AC voltage to the Left Pedestal motor to move the left
end of the Patient Table down.
JP5-2
120V(B)_LEFT AC line to the Left Pedestal motor. JP5-3
GND_PED Ground line to the Left Pedestal motor. JP5-4
120V(A)_UP_RIGHT AC voltage to the Right Pedestal motor to move the
right end of the Patient Table up.
JP4-1
120V(A)_DWN_RIGHT AC voltage to the Right Pedestal motor to move the
right end of the Patient Table down.
JP4-2
120V(B)_RIGHT AC line to the Right Pedestal motor. JP4-3
GND_PED Ground line to the Right Pedestal motor. JP4-4